






















Давайте погрузимся в увлекательный мир двигателей беспилотников FPV! В этом исчерпывающем руководстве мы изучим тонкости конструкции двигателя, конструктивные особенности и факторы, которые могут влиять на производительность и эффективность двигателя. Твердое понимание выбора конструкции даст вам знания, чтобы выбрать идеальный двигатель для следующей конструкции дрона.
Если вы все еще не уверены, какой двигатель выбрать, не беспокойтесь! Я предоставляю вам мои лучшие рекомендации по двигателям дронов FPV:
Рекомендации
«Лучший двигатель» для дрона FPV во многом зависит от вашего стиля полета, требований и бюджета. Лично я использую свои квадроциклы для свободного стиля, дальней дистанции, а иногда и для гонки и агрессивных полетов. Поэтому я предпочитаю универсальные двигатели со сбалансированной производительностью.
Интересно, какой размер двигателя и KV следует использовать? Перейдите по этой ссылке в таблицу рекомендаций по размеру рамы, размеру винта и напряжению аккумулятора:
Двигатели на 5 дюймов
При выборе двигателя KV, 1600-2100KV для 6S, в то время как 2300-2800KV для 4S. Варианты с более высоким KV, как правило, более агрессивны и энергоемки, тогда как варианты с более низким KV являются консервативными и эффективными.
T-Motor Velox Veloce V2207.5 V2
Бюджетний мотор достойного качества

Velox V2207 V2/V3 пожалуй, самый дешевый мотор, который стоит приобрести сегодня. Это бюджетное предложение T-Motor с современным дизайном и функциями: магниты N52, титановый вал и изготовленные авторитетной компанией T-Motor. Они предлагают разные параметры KV, для кинематографических и выносливых типов полета, я думаю, что 1750KV отлично подходит для 6S. Для гонки или более агрессивных полетов свободным стилем выбирайте 1950KV-2050KV. Для аккумулятора 4S выберите 2550 кВ.
RCinPower Wasp Major
Лучшая производительность с точки зрения мощности и чувствительности

Один из лучших универсальных 5-дюймовых двигателей, доступных на сегодняшний день, с чрезвычайной производительностью как в сырой мощности, так и в чувствительности. Это идеальный выбор как для фристайла, так и для гонок.
EMAX ECO II 2207
Найдешевше, що варто мати

Эти двигатели обладают сильными магнитами N52 и добротной сборкой по привлекательной цене. Хотя вы можете найти двигатели за меньшие деньги, их редко стоит покупать.
По слухам, Emax продает двигатели ECO II по заниженной цене, просто пытаясь сравниться с самыми дешевыми двигателями на рынке. Я считаю это правдоподобным, потому что этот двигатель стоит всего $16! У нас нет возможности это доказать, но Emax ECO II зарекомендовал себя как один из лучших бюджетных FPV-двигателей за последние годы.
Возможно, это не самый лучший двигатель для начальной производительности, но вы не можете требовать большего, поскольку это, пожалуй, самые дешевые двигатели, которые стоит иметь сейчас. Они отлично подойдут, если вы только начинаете или хотите построить дрон. Это также очень эффективный двигатель, если для вас важно время полета.
Они предлагают 1700KV и 1900KV для 6S, 2400KV для 4S. Они также выпускают двигатель 2306, но лично я предпочитаю двигатель 2207 с большим размером статора, он мощнее и чувствительнее той же цены.
iFlight Xing2 2207
Испытано и проверено

Он имеет большинство желаемых функций современного двигателя FPV дрона: конструкцию unibell, титановый вал, дуговые магниты с прорезями для более быстрой реакции, мощные магниты N52 и защитное уплотнительное кольцо, чтобы подшипники дольше оставались гладкими.
Кроме выразительного и уникального изогнутого цельного корпуса двигателя, который делает его чрезвычайно прочным, двигатели Xing2 2306 и 2207 также обладают множеством замечательных функций. К примеру, цельный вал двигателя из титанового сплава, надежные подшипники 9x4x4, одножильная обмотка и демпферное кольцо между корпусом и подшипником, что повышает долговечность.
Xing2 – это мощный двигатель с высоким крутящим моментом, который обеспечивает чуткость и быстроту в полете. За 21 доллар за двигатель вы получаете двигатель высокой производительности, который обычно продается в диапазоне цен около 30 долларов, что делает его чрезвычайно выгодным. Я летал на Xing2 на своем новом сборнике Source One V5, и он один из самых плавных в моем парке.
Линейка двигателей iFlight Xing2 предлагает много разных KV в зависимости от напряжения LiPo, которое вы планируете использовать (4S или 6S), винтов и стиля полета. Для 2207 имеется 1855KV (6S) и 2755KV (4S), для 2306 является 1755KV (6S) и 2555KV (4S).
Моторы для 7 дюймов
Вот мои рекомендации по двигателям для дронов 7″ FPV. Мы сосредоточены на эффективности на крейсерской скорости для увеличения времени полета и плавности для минимизации вибрации и тепла. Эти факторы важны, поскольку 7-дюймовые дроны обычно используются для полетов на большие расстояния. Для установок 6S идеально подходят двигатели на 1300 кВ, в то время как для 4S вы можете выбрать 1500 кВ или выше.
EMAX ECO II 2807 1300KV
Тяжелый двигатель, обеспечивающий исключительную производительность

Двигун EMAX ECO II 2807 — супертяжелый соперник в категории 7-дюймовых квадрокоптеров. Этот двигатель весит около 54 г с 7-дюймовыми проволоками и выделяется большим размером статора. Он имеет многожильные обмотки, конструкцию из двух частей и винт M2.
С точки зрения производительности EMAX ECO II 2807 предлагает надежное сочетание тяги, крутящего момента и эффективности. Высокий крутящий момент обеспечивает быструю реакцию и стабильность полета, что имеет решающее значение для съемки плавного видео. Хотя дополнительный вес может быть недостатком для тех, кто помнит общий вес своего дрона, EMAX ECO II 2807 отличается мощностью и стабильностью, что делает его надежным выбором для пилотов, ищущих мощности и стабильности в своем 7-дюймовом квадрокоптере.
T-Motor F90 2806.5 1300KV
Легкий и эффективный двигатель

T-Motor F90 2806.5 1300KV является одним из самых эффективных двигателей для 7-дюймовых дронов, что обеспечивает сбалансированную производительность. Он обладает относительно низкой чувствительностью, что делает его более пригодным для полетов на большие расстояния, а не для полетов свободным стилем.
Если вы предпочитаете эффективность и длительный полет, этот двигатель следует рассмотреть. Для тех, кто ищет легкие двигатели, но с большей чувствительностью к фристайлу, Flyfish Flash 2806.5 может быть хорошей альтернативой.
Двигатели на 3 дюйма
iFlight XING 1504 3900KV
Мощный и отзывчивый
 Двигатель iFlight XING 1504 3900KV невероятно мощный и отзывчивый, что делает его идеальным для высокопроизводительных сборок. Хотя он тяжелее, он компенсирует это поразительной эффективностью. Этот двигатель идеально подходит для более тяжелых конструкций, где вес не является основной проблемой.
Двигатель iFlight XING 1504 3900KV невероятно мощный и отзывчивый, что делает его идеальным для высокопроизводительных сборок. Хотя он тяжелее, он компенсирует это поразительной эффективностью. Этот двигатель идеально подходит для более тяжелых конструкций, где вес не является основной проблемой.
T-Motor F1404 3800KV
Полноценная производительность с высокой эффективностью

T-Motor F1404 3800KV обеспечивает отличную производительность и легкость. Он выделяется своей отзывчивостью и эффективностью, что делает его отличным выбором для сверхлегких конструкций и настроек на большие расстояния.
Двигатели для 4-дюймовых и сверхлегких 5-дюймовых (Sub250) дронов
Конструкции 4" и 5" весом менее 250 граммов приобретают популярность. Вот несколько лучших вариантов этой категории.
Emax ECO II 2004
Лучшее соотношение цены и качества в своем классе
 Двигатель Emax ECO II 2004 – отличный бюджетный вариант в своем классе. Он обеспечивает надежную работу без лишних трат, что делает его надежным выбором для экономных конструкторов.Получите 3000 KV для 4-дюймового на 4S, 2000 KV для 5-дюймового на 6S.
Двигатель Emax ECO II 2004 – отличный бюджетный вариант в своем классе. Он обеспечивает надежную работу без лишних трат, что делает его надежным выбором для экономных конструкторов.Получите 3000 KV для 4-дюймового на 4S, 2000 KV для 5-дюймового на 6S.
T-Motor F2004 1700KV/3000KV
Премиум и универсальный
 T-Motor F2004 поставляется в двух вариантах: 1700KV и 3000KV. Версия 1700KV идеально подходит для сверхлегкой 5" установки на 6S, обеспечивая премиальную производительность. С другой стороны, вариант 3000KV лучше подходит для 4" установок, работающих на 4S, предлагая универсальность и высокую производительность.
T-Motor F2004 поставляется в двух вариантах: 1700KV и 3000KV. Версия 1700KV идеально подходит для сверхлегкой 5" установки на 6S, обеспечивая премиальную производительность. С другой стороны, вариант 3000KV лучше подходит для 4" установок, работающих на 4S, предлагая универсальность и высокую производительность.
С чего начать?
Если вы новичок в сфере FPV, я настоятельно рекомендую сначала ознакомиться с нашим пособием для начинающих, чтобы узнать основы:
Прежде чем выбрать двигатель, важно иметь хотя бы приблизительное представление о размере и весе дрона, который вы планируете построить. Я проведу вас через процесс определения размера двигателя, исходя из того, какой дрон вы пытаетесь построить, но если вы сосредоточены на создании 5″ FPV-дрона, смело переходите в раздел "Размер двигателя".
Некоторые из наиболее важных факторов, которые следует иметь в виду, включают
- Вес двигателя
- Мощность (тяга)
- Эффективность (грамм на ватт)
- Крутящий момент и реакция (смена оборотов)
Бесщеточные и щеточные двигатели
В мире FPV-дронов существует два основных типа двигателей: бесщеточные и щеточные. Как правило, мы предпочитаем бесщеточные двигатели, поскольку они более долговечны и мощны, тогда как щеточные двигатели часто используются в дешевых игрушечных дронах, поскольку они более экономически выгодны в производстве. В этом руководстве мы сосредоточимся исключительно на бесщеточных двигателях, являющихся лучшим выбором для современных FPV-дронов.
Оценка веса и размера рамы дрона
Подсчитывая общий вес вашего FPV-дрона, обязательно учитывайте все компоненты: раму, FC, ESC, двигатели, пропеллеры, RX, VTX, антенну, ESC, LiPo батарею, GoPro и так далее. Хотя это не обязательно должно быть 100% точная оценка, но близкая оценка очень важна. Лучше переоценить вес и иметь дополнительную мощность, чем недооценить и сражаться во время взлета.
Определив размер вашей рамы, вы можете установить максимально допустимый размер пропеллера.
Определение требований к тяге
Чтобы рассчитать минимальную тягу, необходимую для вашей комбинации двигателей и пропеллеров, вам понадобится приблизительный общий вес вашего дрона. Общее эмпирическое правило состоит в том, что максимальная тяга, создаваемая всеми двигателями, должна по меньшей мере вдвое превышать общий вес квадрокоптера. Недостаточная тяга может привести к плохой реакции управления и трудностям при взлете.
К примеру, если у вас есть дрон весом 1 кг, суммарная тяга, создаваемая всеми двигателями при 100% газа, должна быть не менее 2 кг. Это 500 г тяги, создаваемой каждым двигателем для квадрокоптера. Конечно, наличие большей тяги, чем нужно, всегда бонус.
Для гоночных дронов соотношение тяги к весу (или соотношение мощности к весу) должно быть значительно выше, чем в приведенном выше примере. Соотношение 10:1 или даже 14:1 – не редкость. Для акро и фристайла я рекомендую иметь соотношение не менее 5:1.
Высшее соотношение тяги к весу дает квадрокоптеру большую маневренность и ускорение, но может сделать его более сложным в управлении, особенно для начинающих. Даже малейшее прикосновение к педали газа может "выстрелить" квадрокоптером на орбиту, как ракетой. Навыки и опыт пилотирования играют немаловажную роль в управлении этой мощностью.
Даже если вы планируете медленно и стабильно летать только для аэрофотосъемки, стремитесь к соотношению тяги к весу выше 3:1 или даже 4:1. Это не только обеспечит лучший контроль, но и оставит место для дополнительной полезной нагрузки.
Подключение бесщеточного двигателя
Для управления бесщеточным двигателем вам понадобится ESC (электронный регулятор скорости). В отличие от щеточных двигателей, имеющих только два провода, бесщеточные двигатели имеют три провода. Вы можете подключить эти провода к ESC в любом порядке. Чтобы изменить направление вращения, просто поменяйте местами два из трех проводов. Кроме того, можно изменить направление вращения двигателя с помощью программных настроек.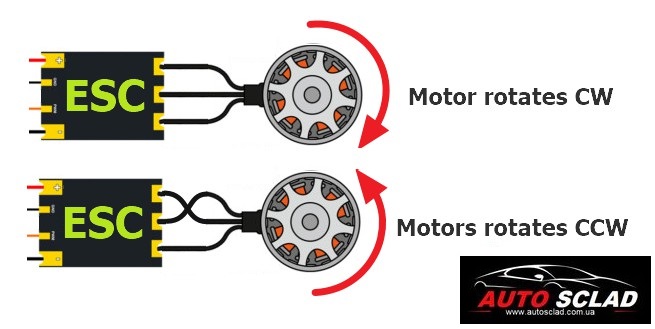
Объяснение размера двигателя
Размер бесщеточного двигателя в RC обычно обозначается четырехзначным числом – AABB:
- "AA" представляет ширину статора (или диаметр статора)
- "BB" представляет высоту статора, оба измеряются в миллиметрах
Статор – это неподвижная часть двигателя, состоящая из "полюсов", обмотанных медными проводами (обмотками). Эти полюсы изготовлены из нескольких слоев тонких металлических пластин, ламинированных между собой, со сверхтонким слоем изоляции между ними.
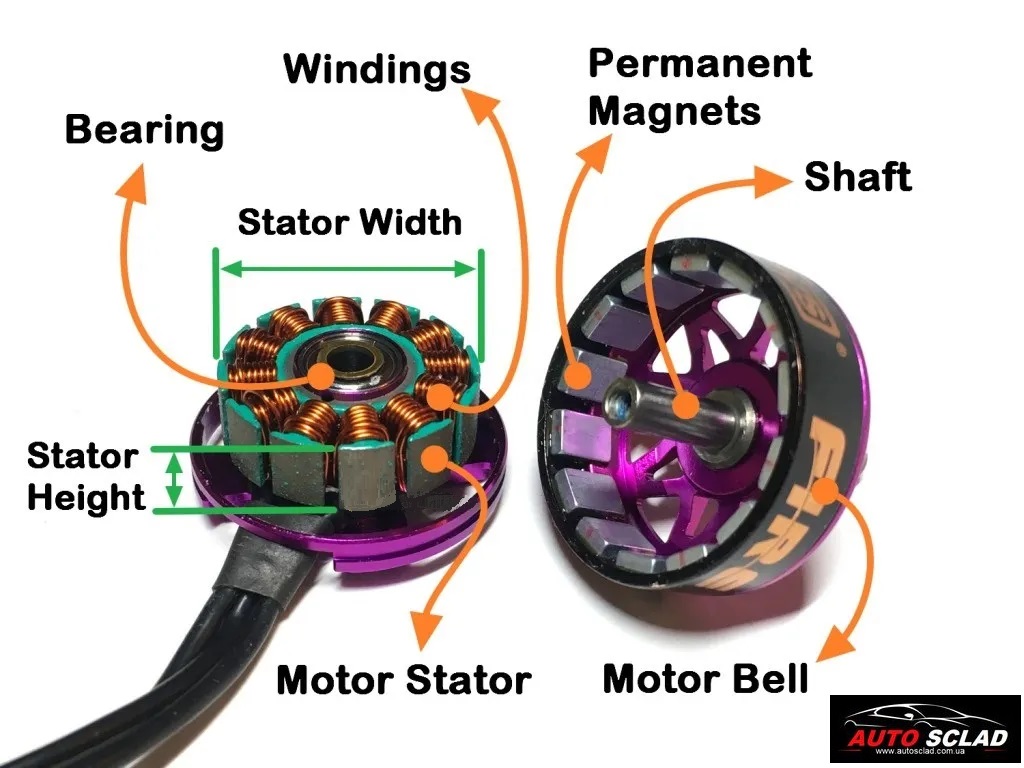
Давайте разберем ключевые компоненты двигателя:
- Статор двигателя Недвижимая часть двигателя состоит из нескольких металлических катушек. Проволока катушки покрыта эмалью, чтобы предотвратить короткое замыкание, поскольку она наматывается в несколько петель. Когда электрический ток проходит через катушки статора, он создает магнитное поле, взаимодействующее с постоянными магнитами на роторе, создавая вращение.
- Магниты Постоянные магниты создают постоянное магнитное поле. В двигателях FPV они прикреплены к внутренней части раструба двигателя с помощью эпоксидной смолы.
- Корпус двигателя: Корпус двигателя служит защитным кожухом для магнитов и обмоток. Обычно из легких металлов, таких как алюминий, некоторые раструбы двигателей сконструированы как миниатюрные вентиляторы, чтобы направлять больший поток воздуха над обмотками двигателя для дополнительного охлаждения во время вращения двигателя.
- Вал двигателя: Соединенный с раструбом двигателя, вал является рабочим компонентом двигателя, который передает создающийся двигателем крутящий момент на гребной винт.
Увеличение ширины или высоты статора увеличивает объем статора, размер постоянных магнитов и электромагнитных катушек статора. В результате увеличивается общий крутящий момент двигателя, что позволяет ему быстрее вращать более тяжелый пропеллер и создавать большую тягу (за счет потребления большего тока). Однако недостатком большего статора является то, что он более тяжел и менее чувствителен.
Сравнение более высоких и широких статоров
Более широкие двигатели имеют большую инерцию при вращении, поскольку масса двигателя находится дальше от оси вращения, что требует больше энергии для изменения оборотов. Следовательно, более широкие и более короткие двигатели обычно менее чувствительны, чем более узкие и более высокие, даже если они имеют одинаковый объем статора и генерируют одинаковый крутящий момент. Более широкие и более короткие двигатели также имеют меньшие магниты на звоне двигателя, что может уменьшить мощность двигателя.
Однако более широкие двигатели обеспечивают лучшее охлаждение благодаря большей площади поверхности сверху и снизу. Температура имеет решающее значение для работы мотора. Когда двигатель нагревается, его способность генерировать магнитный поток уменьшается, что влияет на эффективность и крутящий момент.
По сути, ширина и высота статора двигателя – это баланс между чувствительностью и охлаждением. Решение зависит от вашего стиля полета. Например, для медленных полетов с тяжелой камерой GoPro вам могут понадобиться двигатели с более широким статором для лучшего охлаждения. Для быстрых и чувствительных гоночных или фристайл-дронов лучше подойдут более высокие статоры.
Более широкие статоры также позволяют использовать большие подшипники, что может повысить эффективность, плавность и долговечность.
Большие статоры не всегда лучше. Например, двигатели 2207 могут работать с типичными 5-дюймовыми винтами, но использование гораздо более тяжелых двигателей 2506 того же класса мощности может не дать заметных преимуществ, поскольку они будут создавать такую же тягу с теми же винтами, или даже обеспечивать худшую чувствительность из-за веса. Чтобы улучшить производительность без увеличения веса, рассмотрите двигатели с большей мощностью KV. Однако двигатель 2506 в этом примере, скорее всего, будет лучше работать с 6-дюймовыми винтами, чем 2207 из-за повышенных требований к крутящему моменту.
Крутящий момент двигателя
Двигатели с высоким крутящим моментом обеспечивают быстрое изменение оборотов и более быстрое время отклика, что приводит к уменьшению колебаний гребного винта и более быстрому реагированию.
Крутящий момент двигателя зависит от нескольких факторов, в частности
- Размер (объем) статора
- Материалы: тип магнитов и качество медных обмоток
- Конструкция двигателя: воздушный зазор, количество полюсов и т.п.
Поскольку в последние годы двигатели FPV обладают схожими техническими характеристиками и конструкциями, размер статора является самым простым способом количественного определения крутящего момента.
Размер статора можно рассчитать по формуле объема цилиндра:
volume = pi * radius^2 * height
Например, объем статора двигателя 2207 составляет:
pi x (22/2)^2 x 7 = 2660.93
Чем больше объем статора, тем больший крутящий момент может генерировать двигатель. Если сравнивать двигатель 2306 с объемом 2492,85, то двигатель 2207 имеет больший крутящий момент.
Выбирая двигатель, сравнивайте объем статора и вес двигателя. При прочих равных условиях, более легкий двигатель с одинаковым объемом лучше. Итак, почему бы не выбрать самый большой из доступных двигателей? Ответ кроется в весе. Двигатели с большим объемом статора тяжелее, поэтому выбор зависит от применения.
Например, легким дронам не требуется много газа, чтобы удерживаться в воздухе, и они имеют больше крутящего момента. В паре с пропеллерами с меньшим шагом двигатели могут вращать их с меньшим крутящим моментом. В этом случае требования к крутящему моменту двигателя низкие, что позволяет использовать меньшие и более легкие двигатели, которые уменьшают общий вес.
Единственный случай, когда менее мощный двигатель (с меньшим крутящим моментом) лучше - это когда плавность хода является приоритетом над скоростью реагирования. Двигатели с высоким крутящим моментом могут изменять скорость вращения настолько быстро, что могут казаться рывками и менее плавными. Они также могут создавать больше скачков напряжения и электрических помех в электросети, что потенциально может повлиять на работу гироскопа и общую производительность полета, если фильтрация помех не является оптимальной, что приводит к осцилляциям.
KV
"KV"
указывает на количество оборотов в минуту (об/мин), которые делает двигатель, когда на него подается 1V (один вольт) без нагрузки (например, пропеллера), подсоединенной к двигателю. К примеру, двигатель 2300KV, питающийся от 3S LiPo батареи (12,6 В), будет вращаться со скоростью примерно 28 980 об/мин без установленных пропеллеров (2300 x 12,6). KV обычно является примерной оценкой, указанной изготовителем двигателя.
Когда на двигатель установлен пропеллер, скорость вращения резко уменьшается из-за сопротивления воздуху. Двигатели с большим KV постараются вращать пропеллер быстрее, создавая большую тягу и мощность (потребляя при этом больше тока). Большие пропеллеры обычно работают в паре с двигателями низкого класса, в то время как меньшие, более легкие пропеллеры лучше работают с двигателями высокого класса.
KV двигателя определяется количеством витков обмотки из медной проволоки в статоре. В общем, большее количество витков обмотки уменьшает KV двигателя, в то время как меньшее количество витков увеличивает его. Магнитная сила магнитов также может влиять на значение KV, причем более сильные магниты увеличивают KV.
Если двигатель высокого класса работает в паре с слишком большим пропеллером, он будет пытаться вращаться быстрее, чем с меньшим пропеллером, требуя большего крутящего момента. Этот повышенный крутящий момент приведет к большему потреблению тока и выделению тепла. Перегрев может привести к перегоранию двигателя, поскольку покрытие катушки может расплавиться и вызвать электрическое короткое замыкание внутри двигателя. Вот почему двигатель с более высоким значением KV, скорее всего, будет работать горячее, чем двигатель с более низким значением KV того же размера.
KV также влияет на ограничение тока и напряжения двигателя. Двигатели высшего класса имеют более короткие обмотки и меньшее сопротивление, что уменьшает максимальное номинальное напряжение и увеличивает ток, потребляемый комбинацией двигателя и пропеллера. Однако на странице продукта двигателя будет указано допустимое напряжение и максимальный ток.
Ограничение Betaflight "Мощность двигателя" позволяет снизить сигнал двигателя и использовать батареи большего напряжения (например, летать с 4S двигателями на 6S батареях). Однако хотя этот обходной путь может сработать, он потенциально может вывести из строя ваш ESC при использовании двигателей с высокой мощностью KV. Ограничивая мощность двигателя, вы устанавливаете ограничение на то, как долго MOSFET остается включенным, но вы все равно подвергаете двигателю более высокому напряжению. Это с большей вероятностью приведет к проблемам, чем использование двигателя с меньшим значением KV, рассчитанного на более высокое напряжение. Рекомендуется выбирать двигатели KV в соответствии с напряжением батареи, которое вы планируете использовать.
KV относительно константы крутящего момента
KV двигателя напрямую не влияет на крутящий момент, но влияет на константу крутящего момента. Постоянный момент двигателя определяет, какой ток необходим для создания определенного крутящего момента. KV не влияет на фактический крутящийся генерируемый момент; такие факторы, как сила магнита, воздушный зазор и сопротивление катушки, оказывают гораздо большее влияние на производство крутящего момента.
Двигатели высшего класса напряжения имеют более высокую константу крутящего момента, что означает, что им нужен больший ток для создания одинакового крутящего момента по сравнению с двигателями низшего класса напряжения. Для создания одинакового крутящего момента двигатель высшего класса требует большего тока, что приводит к дополнительным потерям в ESC, аккумуляторе и проводах. Кроме того, в двигателе накапливается больше тепла из-за большего тока, генерируется меньший магнитный поток. В общем, двигатель высшего класса менее эффективен, если вы летите с той же скоростью, что и двигатель более низкого класса.
Поэтому не стоит перегибать палку из KV; старайтесь соблюдать умеренность. Это особенно важно при создании дальнобойного аппарата, для которого приоритетами является эффективность и время полета.
Монтаж двигателя
Распространены схемы крепления (расстояние между отверстиями) для двигателей 22xx, 23xx, 24xx – 16x19 мм и 16x16 мм. Современные рамы 5″ FPV дронов должны поддерживать обе схемы. В крепежных отверстиях этих двигателей используются винты M3. Используйте винты с длиной резьбы на 2 мм больше толщины кронштейнов; например, для 5 мм кронштейнов используйте 7 мм винты, а для 6 мм кронштейнов – 8 мм винты.
 Полюсы и магниты
Полюсы и магниты
Просматривая двигатели для своего FPV-дрона, вы можете встретить такие спецификации, как "12N14P", напечатанные на коробке. Вот что означают эти цифры: число перед буквой "N" указывает количество электромагнитов (полюсов) в статоре, а число перед "P" - количество постоянных магнитов в корпусе.

Двигатели разных размеров имеют разное количество полюсов; например, двигатели 22XX и 23XX обычно имеют 12 полюсов и 14 магнитов.
Количество полюсов оказывает непосредственное влияние на производительность двигателя. Если меньше полюсов, вы можете использовать больше железа в статоре, что приведет к большей выходной мощности. Однако большее количество полюсов приводит к более равномерному распределению магнитного поля. Это, в свою очередь, обеспечивает более плавную работу двигателя с более точным контролем над вращением корпуса.
В двух словах:
- Больше полюсов = более плавная работа
- Меньше полюсов = большая мощность
Поскольку двигатели дронов FPV, как правило, 3-фазные, конфигурация полюсов должна быть кратной 3 (т.е. 9, 12, 15, 18 и т.д.). Это связано с наличием 3 проводов, подключаемых к двигателю. Следовательно, количество полюсов не так легко изменить и не является критическим фактором при выборе двигателей, особенно для FPV дронов. Но вы должны обратить внимание на номер полюса, поскольку вы должны ввести этот номер в Betaflight при включении фильтра оборотов. Если вы не можете найти это число, вы можете просто сосчитать, сколько магнитов в корпусе.
Обмотки двигателя
Количество медных обмоток или "витков" на полюсе статора определяет максимальный ток, который может потреблять двигатель. В то же время, толщина проволоки влияет на способность двигателя справляться с током до достижения точки перегрева.
Проще говоря, меньшее количество витков означает меньшее сопротивление, что приводит к более высокому значению KV. Однако это также приводит к уменьшению электромагнитного поля на статоре и, как следствие, к снижению крутящего момента.
С другой стороны, когда в катушке больше витков, большее количество меди создает более внушительное магнитное поле на полюсе статора, генерируя больший крутящий момент. Но есть загвоздка – более длинные провода и большее сопротивление приводят к снижению KV двигателя.
Итак, как производители решают эти проблемы при увеличении мощности двигателей для дронов FPV? Ответ заключается в увеличении количества обмоток и использовании более толстых медных проводов. Этот гениальный подход эффективно уменьшает сопротивление обмотки, тем самым повышая мощность без ущерба эффективности и крутящему моменту. Кроме того, двигатель с большим сечением проволоки может выдерживать большой ток, не перегорая.
Однако важно отметить, что использование более толстых проводов и дополнительных обмоток приводит к увеличению веса двигателя. Кроме того, обмотка занимает больше физического пространства, что требует большего статора. Вот почему мы наблюдаем появление на рынке более крупных и более тяжелых двигателей, что также объясняет их повышенную мощность.
Многожильные и одножильные обмотки
Когда речь идет об обмотках электродвигателей, есть два основных варианта: одножильные и многожильные. Каждый из них имеет свой набор преимуществ и недостатков, что делает их пригодными для разных приложений.
В одножильных обмотках используются более толстые провода, которые более эффективно отводят тепло, что делает их идеальными для сложных полетов, требующих большой мощности (например, гонки, акро, фристайл и т.п.). Однако толстые провода приводят к увеличению промежутков между ними, что ограничивает количество проводов, которые можно намотать на статор.
С другой стороны, многожильные обмотки заменяют одну толстую проволоку на несколько более тонких. Эти более тонкие провода не так эффективно проводят тепло и более склонны к физическому повреждению.
Несмотря на эти ограничения, многожильные обмотки могут предложить более предпочтительные характеристики, чем одножильные, благодаря более плотной упаковке вокруг статора, с меньшими промежутками между проводами, что приводит к созданию более сильного магнитного поля. Это может привести к повышению мощности и эффективности. Однако многожильную проволоку, как правило, сложнее сделать такой же аккуратной, как и одножильной, а в сочетании с тем, что между многожильными катушками есть больше слоев изоляции, это приводит к увеличению воздушных промежутков между проводами, что может нивелировать упомянутые выше преимущества.
Важно отметить, что аккуратность обмоток играет жизненно важную роль как с эстетической, так и с электрической точки зрения. Неопрятные обмотки с многочисленными перекрестками проводов приводят к менее эффективным магнитным полям, поскольку провода не пересекают статор перпендикулярно. Поэтому, оценивая обмотки двигателя, не забывайте о важности аккуратной и хорошо организованной работы по намотке.
Наконец, многожильная проволока может перегреваться быстрее, чем одножильная, что влияет на выходную мощность и эффективность двигателя. В общем, одножильная обмотка, по всей вероятности, является лучшим выбором на практике.
Подшипник

Подшипники двигателя могут быть нечасто обсуждаемой темой из-за отсутствия информации в Интернете, но они играют решающую роль в работе вашего FPV-дрона. Давайте поближе познакомимся с основами работы подшипников двигателя.
Размер подшипника определяется разницей между его наружным и внутренним диаметрами, а не самими диаметрами. Более широкие подшипники могут вместить большие шарики (или шарики) внутри себя. В то время как большие шарики обеспечивают большую долговечность и стойкость к ударам, меньшие шарики обеспечивают большую стабильность и плавность работы на высоких скоростях и оборотах.
Некоторые двигатели продаются как имеющие "керамические подшипники", в которых используются керамические шарики вместо стальных. Хотя эти подшипники действительно работают более плавно, они также более подвержены поломке.
Внутренний диаметр подшипника также определяет размер используемого вала. Подшипник 9мм х 4мм предлагает хороший баланс между долговечностью и плавностью хода.
Популярные подшипники, используемые в двигателях дронов FPV, включают японские бренды, такие как NSK, NMB и EZO. Хотя подшипники EZO часто рекламируют как самые лучшие, сложно количественно оценить их преимущество над другими брендами. Кроме того, важно учитывать возможность того, что изготовители используют поддельные изделия вместо настоящих.
Выбор правильного размера двигателя для вашего дрона
Чтобы определить идеальный размер двигателя для вашего дрона, следуйте этой последовательности: Размер рамы => Размер пропеллера => Размер двигателя.
Определив размер рамы, можно оценить соответствующий размер двигателя. Размер рамы ограничивает размер пропеллера, а каждый размер пропеллера требует разных оборотов двигателя для эффективного создания тяги – вот здесь и вступает в игру KV двигателя.
Кроме того, убедитесь, что двигатели создают достаточный крутящий момент для вращения выбранного вами пропеллера. Это зависит от размера статора. В общем, больший размер статора и более высокий KV приводят к увеличению потребляемого тока.
В таблице ниже приведены общие рекомендации. Это не является жестким правилом, поскольку вы можете встретить людей, использующих двигатели немного большей или меньшей мощности, чем указано в таблице. Однако она служит хорошей отправной точкой. В этой таблице предполагается, что вы живите свой квадроцикл от 4S LiPo аккумуляторов, а размер рамы соответствует колесной базе (т.е. диагональному расстоянию от двигателя до двигателя).
| Розмір рами | Розмір | Розмір мотора | KV |
| 150mm или меньше | 3″ или меньше | 1105 -1306 или меньше | 3000KV и выше |
| 180mm | 4″ | 1806, 2204 | 2600KV – 3000KV |
| 210mm | 5″ | 2205-2208, 2305-2306 | 2300KV-2600KV |
| 250mm | 6″ | 2206-2208, 2306 | 2000KV-2300KV |
| 350mm | 7″ | 2506-2508 | 1200KV-1600KV |
| 450mm | 8″, 9″, 10″ и больше | 26XX и больший | 1200KV и ниже |
Учитывая напряжение и потребляемый ток
Понимание роли напряжения в выборе двигателя имеет решающее значение. При использовании высшего напряжения двигатель будет пытаться вращаться быстрее, что приведет к увеличению потребления тока. Помните о тяге, которую создают ваши двигатели, и о потребляемом ими токе.
После того, как вы четко поймете, какой ток потребляет ваш двигатель и пропеллер, вы сможете уверенно выбрать правильный ESC для вашего дрона. Имейте в виду, что ESC должен выдерживать максимальный ток, потребляемый двигателем, не превышая его предела, чтобы обеспечить безопасную и надежную работу.
Как оценить производительность двигателя
После того как вы определитесь с размером двигателя, у вас, скорее всего, останется еще несколько вариантов на выбор. Чтобы определить лучший двигатель для ваших конкретных потребностей, примите во внимание следующие факторы:
- Тяга
- Коэффициент полезного действия и потребляемый ток
- Вес
Наконец, на ваш выбор двигателя будут влиять предполагаемое применение, стиль полета и желаемые эксплуатационные характеристики.
Тяга.
Когда дело доходит до выбора двигателя для вашего FPV-дрона, первое, что приходит в голову, – это тяга. В конце концов это сила, которая двигает ваш дрон в воздухе и позволяет ему выполнять впечатляющие воздушные маневры.
Хотя большая тяга означает более быстрое ускорение, очень важно не забывать о других факторах, таких как потребление тока и эффективность. Выбор комбинации двигателя и пропеллера, требующей чрезмерного тока, может привести к чрезмерной нагрузке на батареи, что может сократить срок службы.
Если дрон потребляет значительное количество тока на высокой скорости, важно убедиться, что максимальная скорость разряда аккумулятора соответствует этой задаче.
Хотя тяга, несомненно, является жизненно важным аспектом, который следует учитывать при выборе двигателя для вашего FPV-дрона, важно взвесить его с другими факторами, как указано ниже.
Вес двигателя
Вес двигателя – это фактор, который часто игнорируется при выборе двигателя для FPV-дронов, но он играет решающую роль, особенно для высокопроизводительных дронов, таких как гоночные и фристайл-дроны.
Двигатели устанавливаются по четырем углам рамы, а это значит, что они оказывают значительное влияние на чувствительность квадрокоптера. Более тяжелые двигатели увеличивают угловой момент инерции, что требует большего крутящего момента (а не только тяги) для изменения положения дрона.
В реальных полетных сценариях, когда ваш квадрокоптер выполняет опрокидывание и крены, нужно время, чтобы набрать угловое ускорение, достичь нужного положения, а затем остановиться. Более тяжелым двигателям нужно больше времени, чтобы добиться необходимой угловой скорости и замедлиться, из-за чего дрон чувствует себя менее чутким. Это особенно важно, если ваш стиль полета предполагает быстрое изменение направления, например, фристайл или гонки. Для тех, кто в первую очередь ориентирован на крейсерский полет по прямой линии, как кинематографические крейсеры, вес двигателя может быть не таким критическим.
Эффективность и потребляемый ток
Выбирая двигатель для дрона FPV, важно учитывать эффективность двигателя, обычно рассчитываемую путем деления тяги на мощность при 100% дросселе, измеряемом в граммах на ватт (г/Вт). Чем выше число, тем эффективнее двигатель.
Однако не смотрите на эффективность только на верхнем пределе. Проанализируйте эффективность во всем диапазоне дроссельной заслонки, особенно в диапазоне, на котором вы будете преимущественно летать. Некоторые двигатели могут быть эффективны на более низких уровнях дроссельной заслонки, но теряют эффективность, когда они потребляют больший ток, приближаясь к своим предельным значениям.
Еще одной полезной метрикой для измерения эффективности являются "граммы на ампер" (тяга/ток).
Как правило, с увеличением тяги растет и ток, необходимый для ее создания. Поэтому лучше двигатели с высокой тягой и низким потреблением тока. Неэффективные двигатели могут создавать недостаточную тягу или потреблять избыточный ток.
Каждый двигатель по-разному реагирует на разные пропеллеры. Выбор правильного винта имеет решающее значение для сбалансирования тяги и эффективности.
Учтите, что эффективность и потребляемый ток также влияют на выбор аккумулятора. Эффективный двигатель с высоким потреблением тока может злоупотреблять батареей и вызвать просадку напряжения, поэтому важно найти правильный баланс для оптимизации производительности вашего дрона.
Усовершенствованные факторы производительности двигателей
Некоторые характеристики двигателей для дронов не упоминаются производителями в явном виде, и их можно обнаружить только путём более глубокого технического тестирования. Вот несколько дополнительных факторов, которые следует учитывать при выборе двигателя:
- Крутящий момент
- Время отклика
- Температура
- Вибрация и баланс
Крутящий момент двигателя
Крутящий момент – это сила, отвечающая за вращение пропеллера, определяя, как быстро двигатель может увеличивать и уменьшать количество оборотов. Иными словами, он показывает, насколько легко двигатель может двигать ротор, пропеллер и, что самое важное, воздух.
Крутящий момент двигателя оказывает существенное влияние на производительность вашего квадрокоптера, в частности, на его точность и реакцию во время полета. Двигатель с высоким крутящим моментом обеспечивает более быструю реакцию благодаря более быстрому изменению оборотов. С увеличением крутящего момента вы даже можете ощутить уменьшение стирания винта.
Кроме того, высокий крутящий момент позволяет использовать более тяжелые пропеллеры (хотя и за счет большего потребления тока). Если низкомоментному двигателю поручить вращать слишком тяжелый для него пропеллер (также известный как перегрузка), двигатель будет пытаться генерировать достаточную силу для достижения нужных оборотов, что приведет к низкой эффективности и перегреву.
Однако двигатели с высоким крутящим моментом имеют один потенциальный недостаток: колебания. Эти двигатели могут изменять частоту вращения настолько быстро, что могут усугублять ошибки (в контуре PID контроллера полета), что приводит к колебаниям, которые трудно устранить даже с помощью настройки PID и фильтров.
На крутящий момент напрямую влияет размер статора, как правило, чем больше статор, тем больше крутящий момент. Другие факторы, которые могут увеличить крутящий момент, включают
- Сильнейшие магниты
- Минимизация воздушного зазора между постоянными магнитами и статором, например использование дуговых магнитов
- Более тонкие слои статора
Еще одним преимуществом двигателей с высоким крутящим моментом является их повышенная толерантность к большему шагу и размеру пропеллера, что позволяет лучше работать с более широким диапазоном пропеллеров. Однако использование более легких пропеллеров также может быть полезным, поскольку смена оборотов происходит быстрее.
Время отклика
Время отклика двигателя тесно связано с крутящим моментом, причем двигатели с высоким крутящим моментом обычно имеют более быстрое время отклика. Простой способ измерить время отклика – оценить, сколько времени нужно двигателю, чтобы достичь максимальных оборотов от 0.
На время отклика сильно влияет вес и шаг выбранного вами пропеллера. Имейте в виду, что атмосферные условия также могут играть определенную роль. К примеру, на меньших высотах воздух плотнее, а это означает, что пропеллеру нужно сдвинуть больше молекул воздуха, чтобы создать тягу. На больших высотах пропеллеры будут вращаться быстрее и быстрее реагировать на изменение газа, но общая тяга будет меньше из-за меньшего количества молекул воздуха, с которыми пропеллер может взаимодействовать.
Температура
Температура играет решающую роль в производительности и долговечности бесщеточных двигателей. Магниты, используемые в этих двигателях, демонстрируют более слабое магнитное поле при высоких температурах, что может привести к более быстрому размагничиванию и повлиять на срок службы двигателя.
Чрезмерная поддержка двигателей или чрезмерное использование полного газа может привести к перегреву двигателей. Это, в свою очередь, может со временем усугубить производительность двигателя и магнитов. Поэтому конструкции двигателей, облегчающих охлаждение, часто коррелируют с более длительным сроком службы.
Вибрация
Вибрация, вызванная двигателями, может привести к нескольким нежелательным последствиям для производительности вашего квадрокоптера.
Двигатель с плохим балансом или низким качеством сборки может генерировать вибрации, которые могут влиять на ваш PID-контроллер. Поскольку частота вибраций меняется на разных уровнях дроссельной заслонки, настройка вашего квадроцикла может стать все более сложной задачей.
Кроме того, испытывающий вибрации двигатель производит больше электрического шума, чем двигатель, работающий бесперебойно. Этот электрический шум может влиять на работу гироскопа, еще больше ухудшая характеристики полета, и может ухудшить качество видео, если ваша система FPV питается непосредственно от аккумулятора дрона.
Для уменьшения вибрации большинство полетных контроллеров поставляются с мягким креплением, например резиновыми прокладками, которые обеспечивают значительные улучшения. Однако важно помнить, что поврежденные, изогнутые или несбалансированные пропеллеры также могут вызвать проблемные вибрации. Убедитесь, что вы регулярно проверяете свои пропеллеры и заменяете их при необходимости для поддержания оптимальной производительности.
Ключевые особенности двигателей для FPV-дронов
На производительность двигателя может влиять множество факторов, что делает его сложной и иногда противоречивой темой. Двигатели с одинаковым размером статора и мощностью KV могут демонстрировать разную тягу, потребление тока и время отклика, даже при использовании одинаковых опор. Выбор конструкции и материалов может оказать существенное влияние на производительность.
В этой главе мы рассмотрим различные конструктивные особенности двигателей, которые способствуют повышению производительности и изменяют характеристики двигателя.
Вал двигателя
Вал двигателя является неотъемлемой частью бесщеточного двигателя, поскольку он отвечает за надежное крепление пропеллера. Большинство бесщеточных двигателей, предназначенных для 3", 4", 5" и 6" пропеллеров, имеют валы M5 диаметром 5 мм.
Конструкция вала двигателя со временем эволюционировала, чтобы обеспечить лучшую производительность и долговечность.
- Цельнолитые алюминиевые валы: В прошлом валы двигателей изготовлялись из сплошных алюминиевых стержней. Хотя они были легкими, эти валы были менее жесткими и более склонными к гибке.
- Полые титановые валы: Чтобы решить проблемы со сплошными алюминиевыми валами, производители начали использовать полые титановые валы. Эти валы предлагали аналогичную экономию веса, но были значительно более жесткими и более устойчивыми к изгибу. Однако сверление отверстия в центре титанового вала увеличивало производственные издержки.
- Гибридные валы: Недавно некоторые производители двигателей разработали гибридную конструкцию вала, вставив стальной стержень внутрь полого титанового вала. Эта инновационная конструкция сочетает жесткость и прочность стали с легкостью титана, обеспечивая отличную производительность и долговечность.
Тип магнита
Магниты, используемые в бесщеточных двигателях, классифицируются по силе магнитного поля, например N50, N52, N54, где выше цифры указывают на более сильное магнитное поле. К примеру, двигатель с магнитами N52SH будет лучше, чем двигатель с магнитами N50SH.
Сильнее магнитное поле теоретически позволяет двигателю генерировать энергию более эффективно, что приводит к большему крутящему моменту и более быстрому времени отклика. Однако двигатель с более сильным магнитным полем, как правило, оставляет больше насечек при вращении вручную. Это не обязательно хорошо, поскольку указывает на менее равномерное магнитное поле, что может привести к менее плавной работе двигателя. Вы можете заметить, что некоторые двигатели при вращении вручную ощущаются более "зазубренными", чем другие, что является отражением того, насколько сильны магниты. Более сильные магниты делают двигатель более зубчатым.
Важно отметить, что магниты могут терять свою магнитную силу при высоких температурах, что может повлиять на производительность двигателя. Чтобы решить эту проблему, производители двигателей часто используют магниты N52H, выдерживающие высокие температуры. Некоторые двигатели даже используют магниты N52SH, которые, как считается, способны выдерживать еще более высокие температуры.
Наконец, нередко магниты расшатываются во время аварий или из-за вибрации. Чтобы устранить эту проблему, вы можете использовать Loctite 438, чтобы приклеить магниты на место в раструбе двигателя.
Изогнутые магниты
Использование магнитов, также известных как дуговые магниты, – это технология, позволяющая приблизить магниты к статору, что обеспечивает меньший и более стабильный воздушный зазор. Это, в свою очередь, обеспечивает лучшую производительность двигателей.
В изогнутых магнитах сильнейшая магнитная точка каждого полюса больше не находится на поверхности магнита, в отличие от стандартных не изогнутых магнитов. Эпицентр поля полюса на наружной стороне кривой будет находиться под поверхностью магнита, а эпицентр полюса на внутренней кривой будет практически над поверхностью, что еще больше сближает магнитные поля неизменных и электромагнитов.
Помимо формы магнитов, некоторые производители тестируют мини-квадрокоптеры с разной толщиной магнитов, и обнаружили, что немного более тонкий магнит (и, соответственно, более слабое магнитное поле) также может дать заметную разницу в производительности.
Воздушный зазор
"Воздушный зазор" в двигателе – это расстояние между постоянными магнитами и статором. Магнитная сила нелинейно уменьшается с расстоянием, поэтому уменьшение зазора между ними значительно повышает мощность двигателя. Меньший воздушный зазор не только делает двигатель более мощным, но и улучшает крутящий момент и реакцию.
Недостатком увеличения воздушного зазора есть увеличение потребляемого тока и снижение эффективности. Также есть беспокойство относительно долговечности, если раструб двигателя испытывает любой удар и он сместится, магнит может столкнуться со статором и в конечном итоге сломаться.
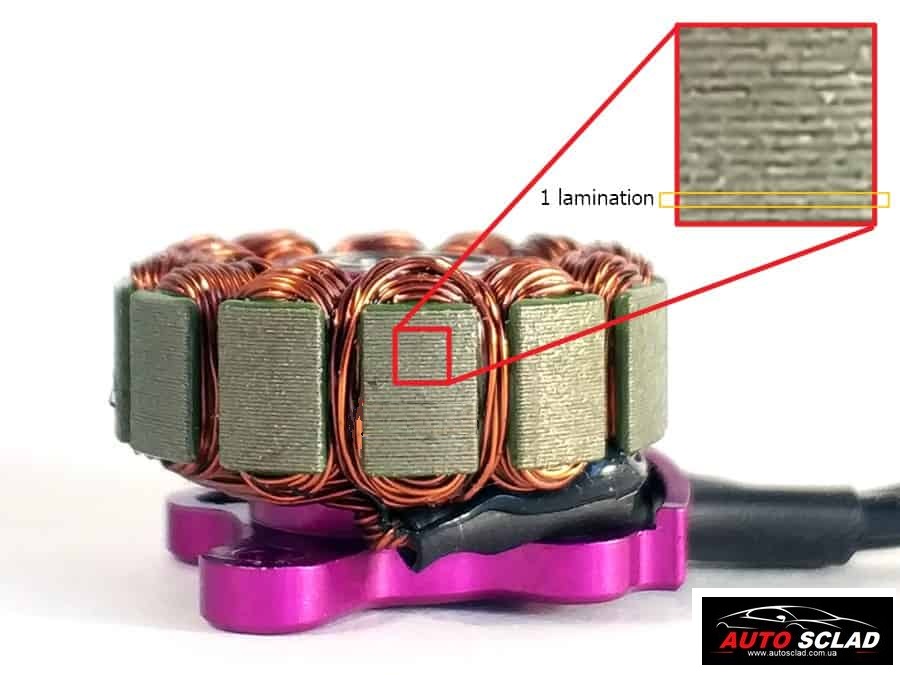
Ламинирование статоров
Ламинация – это толщина отдельных листов металла, складывающихся в статор двигателя. Более тонкое ламинирование позволяет укладывать больше слоев статорных пластин при одинаковой высоте статора двигателя.
В общем, более тонкие ламинации статора лучше влияют на производительность электродвигателя. Они помогают уменьшить явление, известное как вихревой ток, генерирующий тепло в изменяющейся магнитной среде. Более тонкие слои означают, что меньше энергии тратится на генерацию вихревых токов, что приводит к более эффективным и мощным двигателям.
C-образный зажим/винт для вала
Когда дело доходит до крепления вала двигателя, двигатели дронов FPV используют один из трех методов: C-образные зажимы, E-образные зажимы или винты. Каждый метод имеет свои преимущества и недостатки, поэтому трудно определить, какой из них лучший.

В общем, винты легче снимать и удобнее для обслуживания, чем С-образные или Е-образные зажимы. Однако винты имеют больший риск быть излишне затянутыми, что может заблокировать вал и усложнить вращение двигателя.
С другой стороны были сообщения о том, что С-образные зажимы выскакивали во время полета, что могло привести к отрыву колокольчика двигателя и аварии. Хотя винты могут казаться более безопасным вариантом, они не застрахованы от этой проблемы.
Алюминиевый сплав
Металл, из которого изготовлен раструб и основание двигателя, определяет долговечность двигателя. Существует два распространенных типа алюминиевых сплавов, используемых в двигателях FPV: 7075 и 6082. Цифры обозначают разные серии марок и химический состав алюминиевых сплавов.
Если коротко, то 6082 имеет большую пластичность и лучше поддается формированию, тогда как 7075 более жесткий и лучше выдерживает соприкосновение. 6082 использовался еще до 2016/2017 года, но 7075 является самым распространенным в современных двигателях и считается более крепким против ударов.
Корпус мотора
Существует два типа конструкций корпуса: двухкомпонентная конструкция и конструкция Unibell.
Конструкция корпуса из 2 частей включает в себя обработанную верхнюю алюминиевую часть, соединенную со стальным кольцом, прикрепленным под ней, – традиционная и широко используемая конструкция в двигателях.
Конструкция Unibell имеет алюминиевый корпус, надеваемый на стальное кольцо – как тонкая защитная оболочка, окружающая стальное кольцо.
Цельная конструкция корпуса Unibell добавляет двигателю незначительного увеличения веса по сравнению с двухкомпонентной конструкцией корпуса, однако она повышает долговечность и снижает риск соскальзывания корпуса двигателя вниз, что является распространенной проблемой в некоторых двухкомпонентных конструкциях корпуса. Двигатели с двухкомпонентной конструкцией могут пострадать от отделения контактного кольца от верхней части корпуса во время сильной аварии, что сделает двигатель непригодным для использования. Однако с конструкцией Unibell такое практически не происходит благодаря большой площади адгезии, которая обеспечивает прочное и надежное соединение двух компонентов.
Несмотря на небольшую потерю в весе, дополнительная долговечность, которую обеспечивает конструкция Unibell, по моему мнению, оправдывает стоимость. В конце концов. Незначительное увеличение веса приводит к значительному увеличению прочности, а это компромисс, на который следует уйти.
Конструкция флюсового кольца
Флюсовое кольцо – это круглое стальное кольцо внутри корпуса, содержащее магниты. Корпус обычно изготавливается из алюминия, в то время как флюсовые кольца изготавливаются из стали, поскольку они должны реагировать на линии магнитного поля.
Последний дизайн кольца потокосъемника имеет нестандартную форму вместо привычной круглой, что помогает направить больше магнитных силовых линий назад в двигатель и повысить крутящий момент.
Уплотнительное кольцо
Уплотнительное кольцо под внутренней частью раструба двигателя – отличная функция, которую следует иметь в двигателе.
Уплотнительное кольцо действует как буфер/подушка, поглощая часть ушибов от физических воздействий. Это может помочь сохранить плавность хода подшипника в течение более продолжительного периода, что потенциально увеличивает срок службы двигателя. Дополнительная защита, обеспечивающая уплотнительное кольцо, также может снизить потребность в техническом обслуживании и частоту замены деталей, предлагая как экономические, так и практические преимущества для пользователей.
Конструкция платформы
В дизайне корпуса двигателя существует более традиционный подход "закрытое дно" и более современный стиль "открытое дно". Оба варианта имеют свои плюсы и минусы.


Конструкция "закрытого дна" означает более крепкое основание, однако "голое дно", как правило, легче за счет удаления избыточного материала, экономия веса составляет около 2 г.
У двигателей с закрытым дном меньшая вероятность попадания грязи внутрь корпуса, вопреки утверждению, что у двигателей с голым дном грязь легче вычищается.
С открытым дном вы можете четко видеть, насколько глубоко вкручены винты, и у вас меньше шансов укоротить обмотку двигателя, если винты слишком длинные. (Это часто случается с начинающими моторами с закрытым дном).

Однако закрытое дно обеспечивает лучшую разгрузку проводов в случае разрыва и растяжения.
Посеребренные медные провода
И серебро, и медь известны своей исключительной проводимостью. Но серебро, являясь большим атомом с большим количеством внутренних электронных оболочек, очень слабо удерживает свой внешний электрон. Это означает, что оно может легче разъединять свои электроны, позволяя им свободнее двигаться по металлу, перенося тепло и электричество. Таким образом, серебро является даже лучше проводником, чем медь.
Нанося серебро на внешнюю сторону медной проволоки, вы улучшаете ее электро- и теплопроводность, что полезно для двигателей.
Однако медные провода с серебряным покрытием гораздо дороже обычных медных проводов, поэтому они не очень распространены в бюджетных двигателях.
Технология PoPo
Система "Pop on Pop off" - это вал двигателя с подпружиненным подшипником для быстрой установки и снятия стоек.
Другие особенности
- Паяльные вкладки
- Интеграция ESC
- Дизайн охлаждения
Производители двигателей постоянно экспериментируют с разными конструкциями и уровнями аппаратной интеграции, что привело к прогрессу в охлаждении и даже интеграции ESC внутрь двигателя. Лично я считаю, что паяные вкладки на двигателе могут пригодиться, они позволяют использовать более тонкую проволоку, чтобы сэкономить вес в менее требовательных к мощности приложениях. Кроме того, их можно будет легко отремонтировать, если провода оборвутся, что часто может означать конец двигателя типовой конструкции.
Двигатели для дронов правого и левого вращения.
Вы редко увидите бесщеточные двигатели, маркированные как CW (по часовой стрелке) и CCW (против часовой стрелки).
Это не указывает на направление вращения двигателя. Бесщеточные двигатели могут вращаться в любом направлении. Эта метка указывает на направление резьбы болта двигателя. Это сделано для того, чтобы во время вращения двигателя крутящий момент от пропеллера толкал гайку двигателя до затяжки, а не до ослабления. Это предотвращает расшатывание и отпадение ваших стоек во время полета. Это означает, что вам понадобится две гайки для 4-х двигателей при стандартной схеме вращения Betaflight.
- Спереди слева: CW
- Передний правый: ПРОТИВ ЧАСОВОЙ СТРЕЛКИ
- Задний левый: CCW
- Задний правый: CW
Чтобы определить, правильно ли вы включили резьбовой двигатель, просто удерживайте гайку на валу, а затем начните вращать двигатель рукой в том направлении, в котором он должен вращаться. Если гайка затягивается, то у вас правильный двигатель:)
Лично я предпочитаю иметь одинаковую резьбу на всех моих двигателях, чтобы не путаться в разных гайках. Если вам нужно заменить гайку в строительном магазине, это может быть настоящей головной болью – найти гайку с резьбой против часовой стрелки (или, что более распространено в строительном жаргоне, "гайку с левой резьбой"). В настоящее время используются контргайки (с резиновым покрытием внутри), они относительно хорошо держатся, когда их затягивают, и их нелегко открутить.