






















Давайте поринемо у захоплюючий світ двигунів безпілотників FPV! У цьому вичерпному посібнику ми дослідимо тонкощі конструкції двигуна, конструктивні особливості та фактори, які можуть впливати на продуктивність і ефективність двигуна. Тверде розуміння вибору конструкції дасть вам знання, щоб вибрати ідеальний двигун для наступної конструкції дрона.
Якщо ви все ще не впевнені, який двигун вибрати, не хвилюйтеся! Я надаю вам мої найкращі рекомендації щодо двигунів дронів FPV:
Рекомендації
«Найкращий двигун» для дрона FPV багато в чому залежить від вашого стилю польоту, вимог і бюджету. Особисто я використовую свої квадроцикли для вільного стилю, далекої дистанції, а іноді й для перегонів та агресивних польотів. Тому я віддаю перевагу універсальним двигунам зі збалансованою продуктивністю.
Цікаво, який розмір двигуна та KV слід використовувати? Перейдіть за цим посиланням до таблиці рекомендацій за розміром рами, розміром гвинта та напругою акумулятора:
Двигуни на 5 дюймів
При виборі двигуна KV, 1600-2100KV для 6S, тоді як 2300-2800KV для 4S. Варіанти з вищим KV, як правило, більш агресивні та енергоємні, тоді як варіанти з нижчим KV є консервативними та ефективними.
T-Motor Velox Veloce V2207.5 V2
Бюджетний мотор гідної якості

Velox V2207 V2/V3 мабуть, найдешевший мотор, який варто придбати сьогодні. Це бюджетна пропозиція від T-Motor із сучасним дизайном і функціями: магніти N52, титановий вал і виготовлені авторитетною компанією T-Motor. Вони пропонують різні параметри KV, для кінематографічних і витривалих типів польоту, я думаю, що 1750KV чудово підходить для 6S. Для перегонів або більш агресивних польотів вільним стилем вибирайте 1950KV-2050KV. Для акумулятора 4S виберіть 2550 кВ.
RCinPower Wasp Major
Найкраща продуктивність з точки зору потужності та чутливості

Один із найкращих універсальних 5-дюймових двигунів, доступних на сьогодні, із надзвичайною продуктивністю як у сирій потужності, так і в чутливості. Це ідеальний вибір як для фрістайлу, так і для гонок.
EMAX ECO II 2207
Найдешевше, що варто мати

Ці двигуни мають сильні магніти N52 і добротну збірку за привабливою ціною. Хоча ви можете знайти двигуни за менші гроші, їх рідко варто купувати.
За чутками, Emax продає двигуни ECO II за заниженою ціною, просто намагаючись зрівнятися з найдешевшими двигунами на ринку. Я вважаю це правдоподібним, тому що цей двигун коштує всього $16! Ми не маємо можливості це довести, але Emax ECO II зарекомендував себе як один з найкращих бюджетних FPV-двигунів за останні роки.
Можливо, це не найкращий двигун для початкової продуктивності, але ви не можете вимагати більшого, оскільки це, мабуть, найдешевші двигуни, які варто мати на даний момент. Вони чудово підійдуть, якщо ви тільки починаєте або хочете побудувати дрон. Це також надзвичайно ефективний двигун, якщо для вас важливий час польоту.
Вони пропонують 1700KV і 1900KV для 6S, 2400KV для 4S. Вони також випускають двигун 2306, але особисто я віддаю перевагу двигуну 2207 з більшим розміром статора, він потужніший і чутливіший за ту ж саму ціну.
iFlight Xing2 2207
Випробувано та перевірено

Він має більшість бажаних функцій сучасного двигуна дрона FPV: конструкцію unibell, титановий вал, дугові магніти з прорізами для швидшої реакції, потужні магніти N52 і захисне ущільнювальне кільце, щоб підшипники довше залишалися гладкими.
Окрім виразного та унікального вигнутого цільного корпусу двигуна, який робить його надзвичайно міцним, двигуни Xing2 2306 та 2207 також мають багато чудових функцій. Наприклад, цільний вал двигуна з титанового сплаву, надійні підшипники 9x4x4, одножильна обмотка та демпферне кільце між дзвоном і підшипником, що підвищує довговічність.
Xing2 — це потужний двигун із високим крутним моментом, який забезпечує чуйність і швидкість у польоті. За 21 долар за двигун ви отримуєте двигун найвищої продуктивності, який зазвичай продається в діапазоні цін близько 30 доларів, що робить його надзвичайно вигідним. Я літав на Xing2 на своїй новій збірці Source One V5, і він один із найплавніших у моєму парку.
Лінійка двигунів iFlight Xing2 пропонує багато різних KV залежно від напруги LiPo, яку ви плануєте використовувати (4S або 6S), гвинтів і стилю польоту. Для 2207 є 1855KV (6S) і 2755KV (4S), для 2306 є 1755KV (6S) і 2555KV (4S).
Мотори для 7 дюймів
Ось мої рекомендації щодо двигунів для дронів 7″ FPV. Ми зосереджені на ефективності на крейсерських швидкостях для збільшення часу польоту та плавності для мінімізації вібрації та тепла. Ці фактори є важливими, оскільки 7-дюймові дрони зазвичай використовуються для польотів на великі відстані. Для установок 6S ідеально підходять двигуни на 1300 кВ, тоді як для 4S ви можете вибрати 1500 кВ або вище.
EMAX ECO II 2807 1300KV
Важкий двигун, який забезпечує виняткову продуктивність

Двигун EMAX ECO II 2807 — суперважкий суперник у категорії 7-дюймових квадрокоптерів. Цей двигун важить близько 54 грамів із 7-дюймовими дротами та виділяється більшим розміром статора. Він має багатожильні обмотки, конструкцію з двох частин і гвинт M2.
З точки зору продуктивності, EMAX ECO II 2807 пропонує надійне поєднання тяги, крутного моменту та ефективності. Високий крутний момент забезпечує швидку реакцію та стабільність польоту, що має вирішальне значення для зйомки плавного відео. Хоча додаткова вага може бути недоліком для тих, хто пам’ятає про загальну вагу свого дрона, EMAX ECO II 2807 вирізняється потужністю та стабільністю, що робить його надійним вибором для пілотів, які шукають потужності та стабільності у своєму 7-дюймовому квадрокоптері.
T-Motor F90 2806.5 1300KV
Легкий і ефективний двигун

T-Motor F90 2806.5 1300KV є одним із найефективніших двигунів для 7-дюймових дронів, що забезпечує збалансовану продуктивність. Він має відносно низьку чутливість, що робить його більш придатним для польотів на великі відстані, а не для польотів вільним стилем.
Якщо ви надаєте перевагу ефективності та тривалому польоту, цей двигун варто розглянути. Для тих, хто шукає легкі двигуни, але з більшою чутливістю для фрістайлу, Flyfish Flash 2806.5 може бути хорошою альтернативою.
Двигуни на 3 дюйма
iFlight XING 1504 3900KV
Потужний і чуйний
 Двигун iFlight XING 1504 3900KV неймовірно потужний і чуйний, що робить його ідеальним для високопродуктивних збірок. Хоча він важчий, він компенсує це вражаючою ефективністю. Цей двигун ідеально підходить для трохи більш важких конструкцій, де вага не є основною проблемою.
Двигун iFlight XING 1504 3900KV неймовірно потужний і чуйний, що робить його ідеальним для високопродуктивних збірок. Хоча він важчий, він компенсує це вражаючою ефективністю. Цей двигун ідеально підходить для трохи більш важких конструкцій, де вага не є основною проблемою.
T-Motor F1404 3800KV
Повноцінна продуктивність із високою ефективністю

T-Motor F1404 3800KV забезпечує відмінну продуктивність і легкість. Він виділяється своєю чуйністю та ефективністю, що робить його чудовим вибором для надлегких конструкцій і налаштувань на великі відстані.
Двигуни для 4-дюймових і надлегких 5-дюймових (Sub250) дронів
Конструкції 4" і 5" вагою менше 250 грамів набувають популярності. Ось кілька найкращих варіантів у цій категорії.
Emax ECO II 2004
Найкраще співвідношення ціни і якості у своєму класі
 Двигун Emax ECO II 2004 є відмінним бюджетним варіантом у своєму класі. Він забезпечує надійну роботу без зайвих витрат, що робить його надійним вибором для економних конструкторів. Отримайте 3000 KV для 4-дюймового на 4S, 2000 KV для 5-дюймового на 6S.
Двигун Emax ECO II 2004 є відмінним бюджетним варіантом у своєму класі. Він забезпечує надійну роботу без зайвих витрат, що робить його надійним вибором для економних конструкторів. Отримайте 3000 KV для 4-дюймового на 4S, 2000 KV для 5-дюймового на 6S.
T-Motor F2004 1700KV/3000KV
Преміум та універсальний
 T-Motor F2004 поставляється в двох варіантах: 1700KV і 3000KV. Версія 1700KV ідеально підходить для надлегкої 5" установки на 6S, забезпечуючи преміальну продуктивність. З іншого боку, варіант 3000KV краще підходить для 4" установок, що працюють на 4S, пропонуючи універсальність і високу продуктивність.
T-Motor F2004 поставляється в двох варіантах: 1700KV і 3000KV. Версія 1700KV ідеально підходить для надлегкої 5" установки на 6S, забезпечуючи преміальну продуктивність. З іншого боку, варіант 3000KV краще підходить для 4" установок, що працюють на 4S, пропонуючи універсальність і високу продуктивність.
З чого почати?
Якщо ви новачок у сфері FPV, я наполегливо рекомендую спершу ознайомитися з нашим посібником для початківців, щоб дізнатися основи:
Перш ніж вибрати двигун, важливо мати хоча б приблизне уявлення про розмір і вагу дрона, який ви плануєте побудувати. Я проведу вас через процес визначення розміру двигуна, виходячи з того, який дрон ви намагаєтеся побудувати, але якщо ви зосереджені на створенні 5″ FPV-дрона, сміливо переходьте до розділу "Розмір двигуна".
Деякі з найбільш важливих факторів, які слід мати на увазі, включають
- Вага двигуна
- Потужність (тяга)
- Ефективність (грам на ват)
- Крутний момент і реакція (зміна обертів)
Безщіткові та щіткові двигуни
У світі FPV-дронів існує два основних типи двигунів: безщіткові та щіткові. Як правило, ми віддаємо перевагу безщітковим двигунам, оскільки вони довговічніші та потужніші, тоді як щіткові двигуни часто використовуються в дешевих іграшкових дронах, оскільки вони більш економічно вигідні у виробництві. У цьому посібнику ми зосередимося виключно на безщіткових двигунах, які є найкращим вибором для сучасних FPV-дронів.
Оцінка ваги та розміру рами дрона
Підраховуючи загальну вагу вашого FPV-дрона, обов'язково враховуйте всі компоненти: раму, FC, ESC, двигуни, пропелери, RX, VTX, антену, ESC, LiPo батарею, GoPro і так далі. Хоча це не обов'язково має бути 100% точна оцінка, але близька оцінка дуже важлива. Краще переоцінити вагу і мати додаткову потужність, ніж недооцінити і боротися під час зльоту.
Визначивши розмір вашої рами, ви зможете встановити максимально допустимий розмір пропелера.
Визначення вимог до тяги
Щоб розрахувати мінімальну тягу, необхідну для вашої комбінації двигунів і пропелерів, вам знадобиться приблизна загальна вага вашого дрона. Загальне емпіричне правило полягає в тому, що максимальна тяга, створювана всіма двигунами, повинна щонайменше вдвічі перевищувати загальну вагу квадрокоптера. Недостатня тяга може призвести до поганої реакції керування і труднощів при зльоті.
Наприклад, якщо у вас є дрон вагою 1 кг, сумарна тяга, що створюється всіма двигунами при 100% газу, повинна бути не менше 2 кг. Це 500 г тяги, створюваної кожним двигуном для квадрокоптера. Звичайно, наявність більшої тяги, ніж потрібно, завжди є бонусом.
Для гоночних дронів співвідношення тяги до ваги (або співвідношення потужності до ваги) має бути значно вищим, ніж у наведеному вище прикладі. Співвідношення 10:1 або навіть 14:1 - не рідкість. Для акро і фрістайлу я рекомендую мати співвідношення щонайменше 5:1.
Вище співвідношення тяги до ваги дає квадрокоптеру більшу маневреність і прискорення, але може зробити його складнішим в управлінні, особливо для початківців. Навіть найменший дотик до педалі газу може "вистрілити" квадрокоптером на орбіту, як ракетою. Навички та досвід пілотування відіграють важливу роль в управлінні цією потужністю.
Навіть якщо ви плануєте повільно і стабільно літати лише для аерофотозйомки, прагніть до співвідношення тяги до ваги вище, ніж 3:1 або навіть 4:1. Це не тільки забезпечить кращий контроль, але й залишить місце для додаткового корисного навантаження.
Підключення безщіткового двигуна
Для керування безщітковим двигуном вам знадобиться ESC (електронний регулятор швидкості). На відміну від щіткових двигунів, які мають лише два дроти, безщіткові двигуни мають три дроти. Ви можете під'єднати ці дроти до ESC у будь-якому порядку. Щоб змінити напрямок обертання, просто поміняйте місцями два з трьох проводів. Крім того, можна змінити напрямок обертання двигуна за допомогою програмних налаштувань.
Пояснення щодо розміру двигуна
Розмір безщіткового двигуна в RC зазвичай позначається чотиризначним числом - AABB:
- "AA" представляє ширину статора (або діаметр статора)
- "BB" представляє висоту статора, обидва вимірюються в міліметрах
Статор - це нерухома частина двигуна, що складається з "полюсів", обмотаних мідними дротами (обмотками). Ці полюси виготовлені з декількох шарів тонких металевих пластин, ламінованих між собою, з надтонким шаром ізоляції між ними.
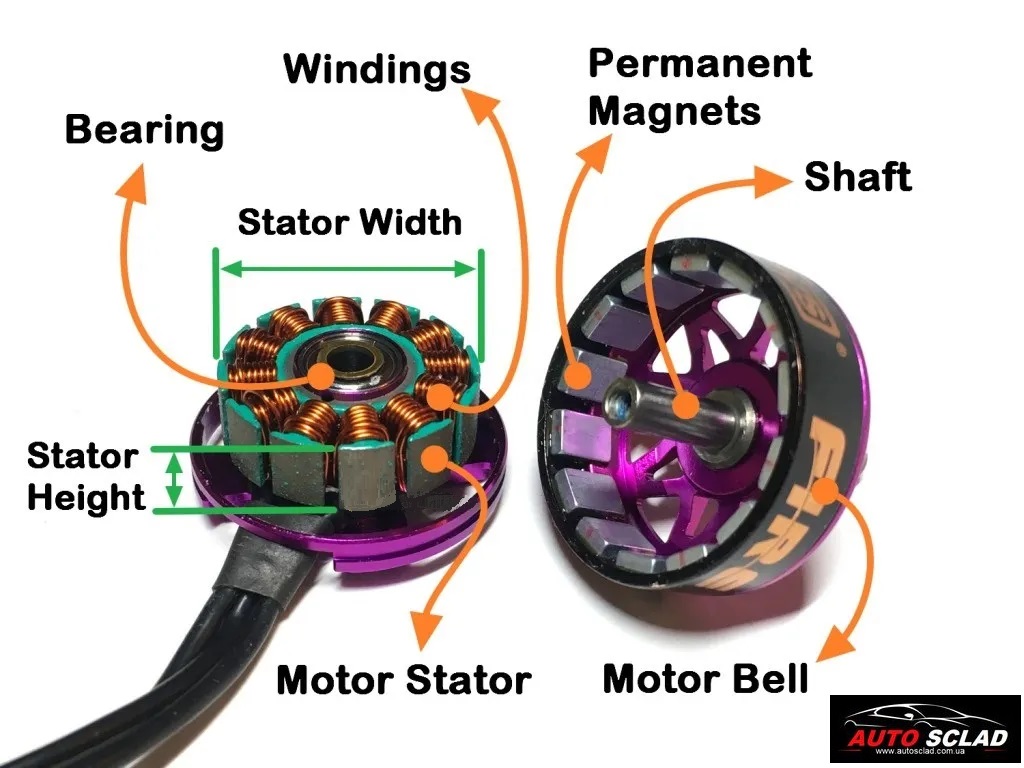
Давайте розберемо ключові компоненти двигуна:
- Статор двигуна: Нерухома частина двигуна складається з декількох металевих котушок. Дріт котушки покритий емаллю, щоб запобігти короткому замиканню, оскільки він намотується в кілька петель. Коли електричний струм проходить через котушки статора, він створює магнітне поле, яке взаємодіє з постійними магнітами на роторі, створюючи обертання.
- Магніти: Постійні магніти створюють постійне магнітне поле. У двигунах FPV вони прикріплені до внутрішньої частини розтруба двигуна за допомогою епоксидної смоли.
- Корпус двигуна: Дзвін двигуна слугує захисним кожухом для магнітів і обмоток. Зазвичай виготовлені з легких металів, таких як алюміній, деякі розтруби двигунів сконструйовані як мініатюрні вентилятори, щоб спрямовувати більший потік повітря над обмотками двигуна для додаткового охолодження під час обертання двигуна.
- Вал двигуна: З'єднаний з розтрубом двигуна, вал є робочим компонентом двигуна, який передає крутний момент, що створюється двигуном, на гребний гвинт.
Збільшення ширини або висоти статора збільшує об'єм статора, розмір постійних магнітів, а також електромагнітних котушок статора. В результаті збільшується загальний крутний момент двигуна, що дозволяє йому швидше обертати важчий пропелер і створювати більшу тягу (за рахунок споживання більшого струму). Однак недоліком більшого статора є те, що він важчий і менш чутливий.
Порівняння вищих і ширших статорів
Ширші двигуни мають більшу інерцію при обертанні, оскільки маса двигуна знаходиться далі від осі обертання, що вимагає більше енергії для зміни обертів. Отже, ширші та коротші двигуни зазвичай менш чутливі, ніж вужчі та вищі, навіть якщо вони мають однаковий об'єм статора і генерують однаковий крутний момент. Ширші та коротші двигуни також мають менші магніти на дзвоні двигуна, що може зменшити потужність двигуна.
Однак ширші двигуни забезпечують краще охолодження завдяки більшій площі поверхні зверху і знизу. Температура має вирішальне значення для роботи двигуна. Коли двигун нагрівається, його здатність генерувати магнітний потік зменшується, що впливає на ефективність і крутний момент.
По суті, ширина і висота статора двигуна - це баланс між чутливістю і охолодженням. Рішення залежить від вашого стилю польоту. Наприклад, для повільних польотів з важкою камерою GoPro вам можуть знадобитися двигуни з ширшим статором для кращого охолодження. Для швидких і чутливих гоночних або фристайл-дронів краще підійдуть вищі статори.
Ширші статори також дозволяють використовувати більші підшипники, що може підвищити ефективність, плавність і довговічність.
Більші статори не завжди кращі. Наприклад, двигуни 2207 можуть працювати з типовими 5-дюймовими гвинтами, але використання набагато важчих двигунів 2506 того ж класу потужності може не дати помітних переваг, оскільки вони створюватимуть таку ж тягу з тими ж гвинтами, або навіть забезпечуватимуть гіршу чутливість через вагу. Щоб покращити продуктивність без збільшення ваги, розгляньте двигуни з більшою потужністю KV. Однак двигун 2506 в цьому прикладі, швидше за все, буде краще працювати з 6-дюймовими гвинтами, ніж 2207 через підвищені вимоги до крутного моменту.
Крутний момент двигуна
Двигуни з високим крутним моментом забезпечують швидку зміну обертів і швидший час відгуку, що призводить до зменшення коливань гребного гвинта і швидшого реагування.
Крутний момент двигуна залежить від декількох факторів, зокрема
- Розмір (об'єм) статора
- Матеріали: тип магнітів і якість мідних обмоток
- Конструкція двигуна: повітряний зазор, кількість полюсів тощо.
Оскільки в останні роки двигуни FPV мають схожі технічні характеристики та конструкції, розмір статора є найпростішим способом кількісного визначення крутного моменту.
Розмір статора можна розрахувати за формулою об'єму циліндра:
volume = pi * radius^2 * height
Наприклад, об'єм статора двигуна 2207 становить:
pi x (22/2)^2 x 7 = 2660.93
Чим більший об'єм статора, тим більший крутний момент може генерувати двигун. Якщо порівнювати двигун 2306 з об'ємом 2492,85, то двигун 2207 має більший крутний момент.
Вибираючи двигун, порівнюйте об'єм статора і вагу двигуна. За інших рівних умов, легший двигун з однаковим об'ємом є кращим. Отже, чому б не вибрати найбільший з доступних двигунів? Відповідь криється у вазі. Двигуни з більшим об'ємом статора важчі, тому вибір залежить від застосування.
Наприклад, легким дронам не потрібно багато газу, щоб утримуватися в повітрі, і вони мають більше крутного моменту. У парі з пропелерами з меншим кроком двигуни можуть обертати їх з меншим крутним моментом. У цьому випадку вимоги до крутного моменту двигуна низькі, що дозволяє використовувати менші та легші двигуни, які зменшують загальну вагу.
Єдиний випадок, коли менш потужний двигун (з меншим крутним моментом) є кращим - це коли плавність ходу є пріоритетом над швидкістю реагування. Двигуни з високим крутним моментом можуть змінювати швидкість обертання так швидко, що можуть здаватися ривками і менш плавними. Вони також можуть створювати більше стрибків напруги і електричних перешкод в електромережі, що потенційно може вплинути на роботу гіроскопа і загальну продуктивність польоту, якщо фільтрація перешкод не є оптимальною, що призводить до осциляцій.
KV
"KV" вказує на кількість обертів на хвилину (об/хв), які робить двигун, коли на нього подається 1V (один вольт) без жодного навантаження (наприклад, пропелера), приєднаного до двигуна. Наприклад, двигун 2300KV, що живиться від 3S LiPo батареї (12,6 В), буде обертатися зі швидкістю приблизно 28 980 об/хв без встановлених пропелерів (2300 x 12,6). KV зазвичай є приблизною оцінкою, вказаною виробником двигуна.
Коли на двигун встановлений пропелер, швидкість обертання різко зменшується через опір повітря. Двигуни з більшим KV намагатимуться обертати пропелер швидше, створюючи більшу тягу і потужність (споживаючи при цьому більше струму). Більші пропелери зазвичай працюють в парі з двигунами низького класу, в той час як менші, легші пропелери краще працюють з двигунами високого класу.
KV двигуна визначається кількістю витків обмотки з мідного дроту в статорі. Загалом, більша кількість витків обмотки зменшує KV двигуна, тоді як менша кількість витків збільшує його. Магнітна сила магнітів також може впливати на значення KV, причому сильніші магніти збільшують KV.
Якщо двигун високого класу працює в парі з надто великим пропелером, він намагатиметься обертатися швидше, ніж з меншим пропелером, вимагаючи більшого крутного моменту. Цей підвищений крутний момент призведе до більшого споживання струму і виділення тепла. Перегрів може призвести до перегорання двигуна, оскільки покриття котушки може розплавитися і викликати електричне коротке замикання всередині двигуна. Ось чому двигун з вищим значенням KV, швидше за все, буде працювати гарячіше, ніж двигун з нижчим значенням KV того ж розміру.
KV також впливає на обмеження струму та напруги двигуна. Двигуни вищого класу мають коротші обмотки та менший опір, що зменшує максимальну номінальну напругу та збільшує струм, який споживає комбінація двигуна та пропелера. Однак на сторінці продукту двигуна буде вказано допустиму напругу і максимальний струм.
Обмеження Betaflight "Потужність двигуна" дозволяє зменшити сигнал двигуна і використовувати батареї більшої напруги (наприклад, літати з 4S двигунами на 6S батареях). Однак, хоча цей обхідний шлях може спрацювати, він потенційно може вивести з ладу ваш ESC при використанні двигунів з високою потужністю KV. Обмежуючи потужність двигуна, ви встановлюєте обмеження на те, як довго MOSFET залишається увімкненим, але ви все одно піддаєте двигун більш високій напрузі. Це з більшою ймовірністю призведе до проблем, ніж використання двигуна з меншим значенням KV, розрахованого на вищу напругу. Рекомендується вибирати двигуни KV відповідно до напруги батареї, яку ви плануєте використовувати.
KV відносно константи крутного моменту
KV двигуна безпосередньо не впливає на крутний момент, але впливає на константу крутного моменту. Постійна моменту двигуна визначає, який струм необхідний для створення певного крутного моменту. KV не впливає на фактичний крутний момент, що генерується; такі фактори, як сила магніту, повітряний зазор і опір котушки, мають набагато більший вплив на виробництво крутного моменту.
Двигуни вищого класу напруги мають вищу константу крутного моменту, що означає, що їм потрібен більший струм для створення однакового крутного моменту порівняно з двигунами нижчого класу напруги. Для створення однакового крутного моменту двигун вищого класу потребує більшого струму, що призводить до додаткових втрат в ESC, акумуляторі та проводах. Крім того, в двигуні накопичується більше тепла через більший струм, генерується менший магнітний потік. Загалом, двигун вищого класу менш ефективний, якщо ви летите з тією ж швидкістю, що і двигун нижчого класу.
Тому не варто перегинати палицю з KV; намагайтеся дотримуватися поміркованості. Це особливо важливо при створенні далекобійного апарату, для якого пріоритетами є ефективність і час польоту.
Монтаж двигуна
Поширені схеми кріплення (відстань між отворами) для двигунів 22xx, 23xx, 24xx - 16x19 мм і 16x16 мм. Сучасні рами 5″ FPV дронів повинні підтримувати обидві схеми. У кріпильні отвори цих двигунів використовуються гвинти M3. Використовуйте гвинти з довжиною різьби на 2 мм більше, ніж товщина кронштейнів; наприклад, для 5 мм кронштейнів використовуйте 7 мм гвинти, а для 6 мм кронштейнів - 8 мм гвинти.
 Полюси та магніти
Полюси та магніти
Переглядаючи двигуни для свого FPV-дрона, ви можете натрапити на такі специфікації, як "12N14P", надруковані на коробці. Ось що означають ці цифри: число перед літерою "N" вказує на кількість електромагнітів (полюсів) у статорі, а число перед "P" - на кількість постійних магнітів у корпусі.

Двигуни різних розмірів мають різну кількість полюсів; наприклад, двигуни 22XX і 23XX зазвичай мають 12 полюсів і 14 магнітів.
Кількість полюсів безпосередньо впливає на продуктивність двигуна. Якщо полюсів менше, ви можете використовувати більше заліза в статорі, що призведе до більшої вихідної потужності. Однак більша кількість полюсів призводить до більш рівномірного розподілу магнітного поля. Це, в свою чергу, забезпечує більш плавну роботу двигуна з більш точним контролем над обертанням дзвону.
У двох словах:
- Більше полюсів = більш плавна робота
- Менше полюсів = більша потужність
Оскільки двигуни дронів FPV, як правило, 3-фазні, конфігурація полюсів повинна бути кратною 3 (тобто 9, 12, 15, 18 і т.д.). Це пов'язано з наявністю 3 проводів, що підключаються до двигуна. Отже, кількість полюсів не так легко змінити і не є критичним фактором при виборі двигунів, особливо для FPV дронів. Але ви повинні звернути увагу на номер полюса, оскільки ви повинні ввести цей номер в Betaflight, коли вмикаєте фільтр обертів. Якщо ви не можете знайти це число, ви можете просто порахувати, скільки магнітів у корпусі.
Обмотки двигуна
Кількість мідних обмоток або "витків" на полюсі статора визначає максимальний струм, який може споживати двигун. Водночас товщина дроту впливає на здатність двигуна справлятися зі струмом до досягнення точки перегріву.
Простіше кажучи, менша кількість витків означає менший опір, що призводить до вищого значення KV. Однак це також призводить до зменшення електромагнітного поля на статорі і, як наслідок, до зниження крутного моменту.
З іншого боку, коли в котушці більше витків, більша кількість міді створює більш значне магнітне поле на полюсі статора, генеруючи більший крутний момент. Але є заковика - довші дроти і більший опір призводять до зниження KV двигуна.
Отже, як виробники вирішують ці проблеми при збільшенні потужності двигунів для дронів FPV? Відповідь полягає у збільшенні кількості обмоток і використанні більш товстих мідних дротів. Цей геніальний підхід ефективно зменшує опір обмотки, тим самим підвищуючи потужність без шкоди для ефективності та крутного моменту. Крім того, двигун з більшим перерізом дроту може витримувати великий струм, не перегоряючи.
Однак важливо зазначити, що використання товстіших проводів і додаткових обмоток призводить до збільшення ваги двигуна. Крім того, обмотка займає більше фізичного простору, що вимагає більшого статора. Ось чому ми спостерігаємо появу на ринку більших і важчих двигунів, що також пояснює їх підвищену потужність.
Багатожильні та одножильні обмотки
Коли мова йде про обмотки електродвигунів, є два основних варіанти: одножильні та багатожильні. Кожен з них має свій набір переваг і недоліків, що робить їх придатними для різних застосувань.
В одножильних обмотках використовуються товстіші дроти, які ефективніше відводять тепло, що робить їх ідеальними для складних польотів, які вимагають великої потужності (наприклад, перегони, акро, фрістайл тощо). Однак товсті дроти призводять до збільшення проміжків між ними, що обмежує кількість дротів, які можна намотати на статор.
З іншого боку, багатожильні обмотки замінюють один товстий дріт на кілька тонших. Ці тонші дроти не так ефективно проводять тепло і більш схильні до фізичного пошкодження.
Незважаючи на ці обмеження, багатожильні обмотки можуть запропонувати кращі характеристики, ніж одножильні, завдяки більш щільній упаковці навколо статора, з меншими проміжками між проводами, що призводить до створення сильнішого магнітного поля. Це може призвести до підвищення потужності та ефективності. Однак багатожильний дріт, як правило, складніше зробити таким же акуратним, як і одножильний, а в поєднанні з тим, що між багатожильними котушками є більше шарів ізоляції, це призводить до збільшення повітряних проміжків між проводами, що може нівелювати згадані вище переваги.
Важливо відзначити, що акуратність обмоток відіграє життєво важливу роль, як з естетичної, так і з електричної точки зору. Неохайні обмотки з численними перехрещеннями проводів призводять до менш ефективних магнітних полів, оскільки дроти не перетинають статор перпендикулярно. Тому, оцінюючи обмотки двигуна, не забувайте про важливість акуратної і добре організованої роботи з намотування.
Нарешті, багатожильний дріт може перегріватися швидше, ніж одножильний, що впливає на вихідну потужність і ефективність двигуна. Загалом, одножильна обмотка, ймовірно, є кращим вибором на практиці.
Підшипник

Підшипники двигуна можуть бути нечасто обговорюваною темою через брак інформації в Інтернеті, але вони відіграють вирішальну роль у роботі вашого FPV-дрона. Давайте ближче познайомимося з основами роботи підшипників двигуна.
Розмір підшипника визначається різницею між його зовнішнім і внутрішнім діаметрами, а не самими діаметрами. Ширші підшипники можуть вмістити більші кульки (або кульки) всередині себе. У той час як більші кульки забезпечують більшу довговічність і стійкість до ударів, менші кульки забезпечують більшу стабільність і плавність роботи на високих швидкостях і обертах.
Деякі двигуни продаються як такі, що мають "керамічні підшипники", в яких використовуються керамічні кульки замість сталевих. Хоча ці підшипники дійсно працюють плавніше, вони також більш схильні до поломки.
Внутрішній діаметр підшипника також визначає розмір вала, який можна використовувати. Підшипник 9 мм х 4 мм пропонує хороший баланс між довговічністю і плавністю ходу.
Популярні підшипники, що використовуються в двигунах дронів FPV, включають японські бренди, такі як NSK, NMB і EZO. Хоча підшипники EZO часто рекламують як найкращі, складно кількісно оцінити їхню перевагу над іншими брендами. Крім того, важливо враховувати можливість того, що виробники використовують підроблені вироби замість справжніх.
Вибір правильного розміру двигуна для вашого дрона
Щоб визначити ідеальний розмір двигуна для вашого дрона, дотримуйтесь цієї послідовності: Розмір рами => Розмір пропелера => Розмір двигуна.
Визначивши розмір рами, ви можете оцінити відповідний розмір двигуна. Розмір рами обмежує розмір пропелера, а кожен розмір пропелера вимагає різних обертів двигуна для ефективного створення тяги - ось тут і вступає в гру KV двигуна.
Крім того, переконайтеся, що двигуни створюють достатній крутний момент для обертання обраного вами пропелера. Це залежить від розміру статора. Загалом, більший розмір статора і вищий KV призводять до збільшення споживаного струму.
У таблиці нижче наведено загальні рекомендації. Це не є жорстким правилом, оскільки ви можете зустріти людей, які використовують двигуни трохи більшої або меншої потужності, ніж вказано в таблиці. Однак вона слугує гарною відправною точкою. У цій таблиці припускається, що ви живите свій квадроцикл від 4S LiPo акумуляторів, а розмір рами відповідає колісній базі (тобто діагональній відстані від двигуна до двигуна).
| Розмір рами | Розмір | Розмір мотора | KV |
| 150mm або менше | 3″ або менше | 1105 -1306 або менше | 3000KV і вище |
| 180mm | 4″ | 1806, 2204 | 2600KV – 3000KV |
| 210mm | 5″ | 2205-2208, 2305-2306 | 2300KV-2600KV |
| 250mm | 6″ | 2206-2208, 2306 | 2000KV-2300KV |
| 350mm | 7″ | 2506-2508 | 1200KV-1600KV |
| 450mm | 8″, 9″, 10″ та більший | 26XX та більший | 1200KV та нижчий |
Враховуючи напругу та споживаний струм
Розуміння ролі напруги у виборі двигуна має вирішальне значення. При використанні вищої напруги двигун намагатиметься обертатися швидше, що призведе до збільшення споживання струму. Пам'ятайте про тягу, яку створюють ваші двигуни, і про струм, який вони споживають.
Після того, як ви чітко зрозумієте, який струм споживає ваш двигун і пропелер, ви зможете впевнено вибрати правильний ESC для вашого дрона. Майте на увазі, що ESC має витримувати максимальний струм, який споживає двигун, не перевищуючи його межі, щоб забезпечити безпечну і надійну роботу.
Як оцінити продуктивність двигуна
Після того, як ви визначитеся з розміром двигуна, у вас, швидше за все, залишиться ще кілька варіантів на вибір. Щоб визначити найкращий двигун для ваших конкретних потреб, візьміть до уваги наступні фактори:
- Тяга
- Коефіцієнт корисної дії та споживаний струм
- Вага
Зрештою, на ваш вибір двигуна впливатимуть передбачуване застосування, стиль польоту і бажані експлуатаційні характеристики.
Тяга.
Коли справа доходить до вибору двигуна для вашого FPV-дрона, перше, що спадає на думку, - це тяга. Зрештою, це сила, яка рухає ваш дрон у повітрі і дозволяє йому виконувати вражаючі повітряні маневри.
Хоча більша тяга означає швидше прискорення, дуже важливо не забувати про інші фактори, такі як споживання струму та ефективність. Вибір комбінації двигуна і пропелера, яка вимагає надмірного струму, може призвести до надмірного навантаження на батареї, що потенційно може скоротити термін їх служби.
Якщо ваш дрон споживає значну кількість струму на високій швидкості, важливо переконатися, що максимальна швидкість розряду акумулятора відповідає цьому завданню.
Хоча тяга, безсумнівно, є життєво важливим аспектом, який слід враховувати при виборі двигуна для вашого FPV-дрона, важливо зважити її з іншими факторами, як зазначено нижче.
Вага двигуна
Вага двигуна - це фактор, який часто ігнорується при виборі двигуна для FPV-дронів, але він відіграє вирішальну роль, особливо для високопродуктивних дронів, таких як гоночні та фрістайл-дрони.
Двигуни встановлюються по чотирьох кутах рами, а це означає, що вони мають значний вплив на чутливість квадрокоптера. Важчі двигуни збільшують кутовий момент інерції, що вимагає більшого крутного моменту (а не тільки тяги) для зміни положення дрона.
У реальних польотних сценаріях, коли ваш квадрокоптер виконує перекидання і крен, потрібен час, щоб набрати кутове прискорення, досягти потрібного положення, а потім зупинитися. Більш важким двигунам потрібно більше часу, щоб досягти необхідної кутової швидкості і сповільнитися, через що дрон відчуває себе менш чуйним. Це особливо важливо, якщо ваш стиль польоту передбачає швидку зміну напрямку, наприклад, фрістайл або перегони. Для тих, хто в першу чергу орієнтований на крейсерський політ по прямій лінії, як кінематографічні крейсери, вага двигуна може бути не такою критичною.
Ефективність і споживаний струм
Вибираючи двигун для дрона FPV, важливо враховувати ефективність двигуна, яка зазвичай розраховується шляхом ділення тяги на потужність при 100% дроселі, вимірюється в грамах на ват (г/Вт). Чим вище число, тим ефективніший двигун.
Однак, не дивіться на ефективність лише на верхній межі. Проаналізуйте ефективність у всьому діапазоні дросельної заслінки, особливо в тому діапазоні, на якому ви будете переважно літати. Деякі двигуни можуть бути ефективними на нижчих рівнях дросельної заслінки, але втрачають ефективність, коли вони споживають більший струм, наближаючись до своїх граничних значень.
Ще однією корисною метрикою для вимірювання ефективності є "грами на ампер" (тяга/струм).
Як правило, зі збільшенням тяги зростає і струм, необхідний для її створення. Тому кращими є двигуни з високою тягою і низьким споживанням струму. Неефективні двигуни можуть створювати недостатню тягу або споживати надмірний струм.
Кожен двигун по-різному реагує на різні пропелери. Вибір правильного гвинта має вирішальне значення для збалансування тяги і ефективності.
Майте на увазі, що ефективність і споживаний струм також впливають на вибір акумулятора. Ефективний двигун з високим споживанням струму може зловживати батареєю і викликати просідання напруги, тому важливо знайти правильний баланс для оптимізації продуктивності вашого дрона.
Удосконалені фактори продуктивності двигунів
Деякі характеристики двигунів для дронів не згадуються виробниками в явному вигляді, і їх можна виявити лише шляхом більш глибокого технічного тестування. Ось кілька додаткових факторів, які слід враховувати при виборі двигуна:
- Крутний момент
- Час відгуку
- Температура
- Вібрація і баланс
Крутний момент двигуна
Крутний момент - це сила, що відповідає за обертання пропелера, визначаючи, як швидко двигун може збільшувати і зменшувати кількість обертів. Іншими словами, він показує, наскільки легко двигун може рухати ротор, пропелер і, що найважливіше, повітря.
Крутний момент двигуна суттєво впливає на продуктивність вашого квадрокоптера, зокрема, на його точність і реакцію під час польоту. Двигун з високим крутним моментом забезпечує більш швидку реакцію завдяки швидшій зміні обертів. Зі збільшенням крутного моменту ви навіть можете відчути зменшення стирання гвинта.
Крім того, високий крутний момент дозволяє використовувати важчі пропелери (хоча і за рахунок більшого споживання струму). Якщо низькомоментному двигуну доручити обертати занадто важкий для нього пропелер (також відомий як перевантаження), двигун буде намагатися генерувати достатню силу, щоб досягти потрібних обертів, що призведе до низької ефективності та перегріву.
Однак двигуни з високим крутним моментом мають один потенційний недолік: коливання. Ці двигуни можуть змінювати частоту обертання так швидко, що можуть посилювати помилки (в контурі PID контролера польоту), що призводить до коливань, які важко усунути навіть за допомогою налаштування PID і фільтрів.
На крутний момент безпосередньо впливає розмір статора, як правило, чим більший статор, тим більший крутний момент. Інші фактори, які можуть збільшити крутний момент, включають
- Сильніші магніти
- Мінімізація повітряного зазору між постійними магнітами і статором, наприклад, використання дугових магнітів
- Більш тонкі шари статора
Ще однією перевагою двигунів з високим крутним моментом є їхня підвищена толерантність до більшого кроку та розміру пропелера, що дозволяє їм краще працювати з ширшим діапазоном пропелерів. Однак використання легших пропелерів також може бути корисним, оскільки зміна обертів відбувається швидше.
Час відгуку
Час відгуку двигуна тісно пов'язаний з крутним моментом, причому двигуни з високим крутним моментом зазвичай мають швидший час відгуку. Простий спосіб виміряти час відгуку - оцінити, скільки часу потрібно двигуну, щоб досягти максимальних обертів від 0.
На час відгуку сильно впливає вага і крок обраного вами пропелера. Майте на увазі, що атмосферні умови також можуть відігравати певну роль. Наприклад, на менших висотах повітря щільніше, а це означає, що пропелеру потрібно зрушити більше молекул повітря, щоб створити тягу. На більших висотах пропелери обертатимуться швидше і швидше реагуватимуть на зміну газу, але загальна тяга буде меншою через меншу кількість молекул повітря, з якими пропелер може взаємодіяти.
Температура
Температура відіграє вирішальну роль у продуктивності та довговічності безщіткових двигунів. Магніти, що використовуються в цих двигунах, демонструють слабше магнітне поле при високих температурах, що може призвести до швидшого розмагнічування і вплинути на термін служби двигуна.
Надмірна підтримка двигунів або надмірне використання повного газу може призвести до перегріву двигунів. Це, в свою чергу, може з часом погіршити продуктивність двигуна та магнітів. Тому конструкції двигунів, які полегшують охолодження, часто корелюють з довшим терміном служби.
Вібрація
Вібрація, спричинена двигунами, може призвести до кількох небажаних наслідків для продуктивності вашого квадрокоптера.
Двигун з поганим балансом або низькою якістю збірки може генерувати вібрації, які можуть впливати на ваш PID-контролер. Оскільки частота вібрацій змінюється на різних рівнях дросельної заслінки, налаштування вашого квадроцикла може стати дедалі складнішим завданням.
Крім того, двигун, що зазнає вібрації, виробляє більше електричного шуму, ніж двигун, що працює безперебійно. Цей електричний шум може впливати на роботу гіроскопа, ще більше погіршуючи характеристики польоту, і навіть може погіршити якість відео, якщо ваша система FPV живиться безпосередньо від акумулятора дрона.
Для зменшення вібрації більшість польотних контролерів постачаються з м'яким кріпленням, наприклад, гумовими прокладками, які забезпечують значні покращення. Однак важливо пам'ятати, що пошкоджені, зігнуті або незбалансовані пропелери також можуть спричиняти проблемні вібрації. Переконайтеся, що ви регулярно перевіряєте свої пропелери і замінюєте їх за необхідності для підтримки оптимальної продуктивності.
Ключові особливості двигунів для FPV-дронів
На продуктивність двигуна може впливати багато факторів, що робить його складною та іноді суперечливою темою. Двигуни з однаковим розміром статора і потужністю KV можуть демонструвати різну тягу, споживання струму і час відгуку, навіть при використанні однакових опор. Вибір конструкції та матеріалів може суттєво вплинути на продуктивність.
У цьому розділі ми розглянемо різні конструктивні особливості двигунів, які сприяють підвищенню продуктивності і можуть змінювати характеристики двигуна.
Вал двигуна
Вал двигуна є невід'ємною частиною безщіткового двигуна, оскільки він відповідає за надійне кріплення пропелера. Більшість безщіткових двигунів, призначених для 3", 4", 5" і 6" пропелерів, мають вали M5 діаметром 5 мм.
Конструкція валу двигуна з часом еволюціонувала, щоб забезпечити кращу продуктивність і довговічність:
- Суцільнолиті алюмінієві вали: У минулому вали двигунів виготовлялися з суцільних алюмінієвих стрижнів. Хоча вони були легкими, ці вали були менш жорсткими і більш схильними до згинання.
- Порожнисті титанові вали: Щоб вирішити проблеми з суцільними алюмінієвими валами, виробники почали використовувати порожнисті титанові вали. Ці вали пропонували аналогічну економію ваги, але були значно жорсткішими і більш стійкими до вигину. Однак свердління отвору в центрі титанового валу збільшувало виробничі витрати.
- Гібридні вали: Нещодавно деякі виробники двигунів розробили гібридну конструкцію валу, вставивши сталевий стрижень всередину порожнистого титанового валу. Ця інноваційна конструкція поєднує жорсткість і міцність сталі з легкістю титану, забезпечуючи чудову продуктивність і довговічність.
Тип магніту
Магніти, що використовуються в безщіткових двигунах, класифікуються за силою магнітного поля, наприклад, N50, N52, N54, де вищі цифри вказують на сильніше магнітне поле. Наприклад, двигун з магнітами N52SH буде краще, ніж двигун з магнітами N50SH.
Сильніше магнітне поле теоретично дозволяє двигуну генерувати енергію більш ефективно, що призводить до більшого крутного моменту і швидшого часу відгуку. Однак двигун з сильнішим магнітним полем, як правило, залишає більше насічок при обертанні вручну. Це не обов'язково добре, оскільки вказує на менш рівномірне магнітне поле, що може призвести до менш плавної роботи двигуна. Ви можете помітити, що деякі двигуни при обертанні вручну відчуваються більш "зазубреними", ніж інші, що є відображенням того, наскільки сильними є магніти. Сильніші магніти роблять двигун більш зубчастим.
Важливо також зазначити, що магніти можуть втрачати свою магнітну силу при високих температурах, що може вплинути на продуктивність двигуна. Щоб вирішити цю проблему, виробники двигунів часто використовують магніти N52H, які витримують високі температури. Деякі двигуни навіть використовують магніти N52SH, які, як вважається, здатні витримувати ще вищі температури.
Нарешті, нерідко магніти розхитуються під час аварій або через вібрацію. Щоб виправити цю проблему, ви можете використовувати Loctite 438, щоб приклеїти магніти на місце в розтрубі двигуна.
Вигнуті магніти
Використання магнітів, також відомих як дугові магніти, - це технологія, яка дозволяє наблизити магніти до статора, що забезпечує менший і більш стабільний повітряний зазор. Це, в свою чергу, забезпечує кращу продуктивність двигунів.
У вигнутих магнітах найсильніша магнітна точка кожного полюса більше не знаходиться на поверхні магніту, на відміну від стандартних не вигнутих магнітів. Епіцентр поля полюса на зовнішній стороні кривої буде знаходитися під поверхнею магніту, а епіцентр полюса на внутрішній кривій буде фактично над поверхнею, що ще більше зближує магнітні поля постійних і електромагнітів.
Крім форми магнітів, деякі виробники тестують міні-квадрокоптери з різною товщиною магнітів, і виявили, що трохи тонший магніт (і, відповідно, слабше магнітне поле) також може дати помітну різницю в продуктивності.
Повітряний зазор
"Повітряний зазор" в двигуні - це відстань між постійними магнітами і статором. Магнітна сила нелінійно зменшується з відстанню, тому зменшення зазору між ними значно підвищує потужність двигуна. Менший повітряний зазор не тільки робить двигун потужнішим, але й покращує крутний момент і реакцію.
Недоліком збільшення повітряного зазору є збільшення споживаного струму та зниження ефективності. Також є занепокоєння щодо довговічності, якщо розтруб двигуна зазнає будь-якого удару і він зміститься, магніт може зіткнутися зі статором і в кінцевому підсумку зламатися.
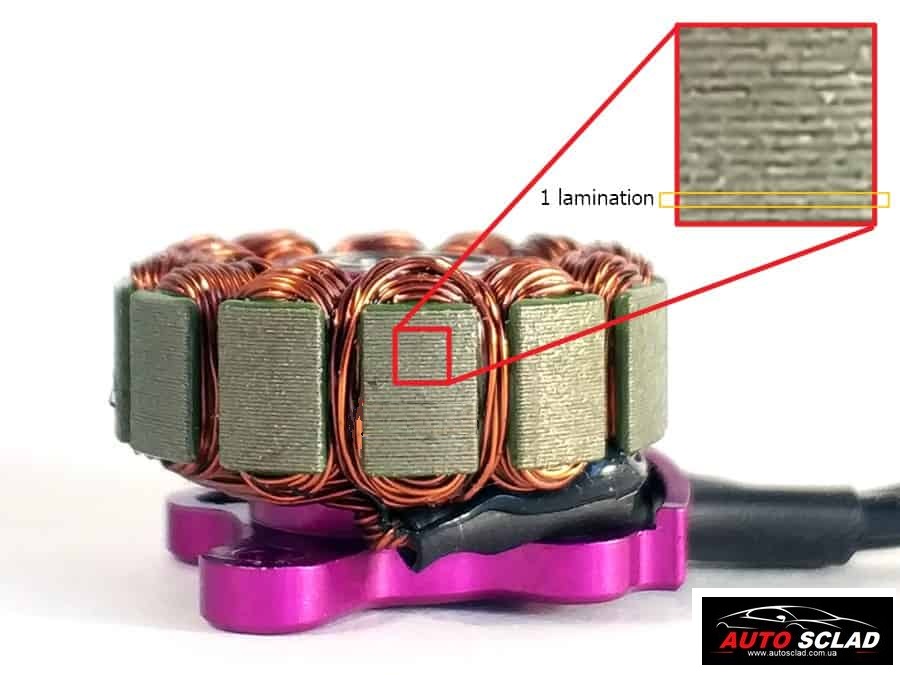
Ламінування статорів
Ламінація - це товщина окремих листів металу, що складаються в статор двигуна. Більш тонке ламінування дозволяє укладати більше шарів статорних пластин при однаковій висоті статора двигуна.
Загалом, більш тонкі ламінації статора краще впливають на продуктивність електродвигуна. Вони допомагають зменшити явище, відоме як вихровий струм, який генерує тепло в мінливому магнітному середовищі. Більш тонкі шари означають, що менше енергії витрачається на генерацію вихрових струмів, що призводить до більш ефективних і потужних двигунів.
C-образний затискач / гвинт для вала
Коли справа доходить до кріплення валу двигуна, двигуни дронів FPV використовують один з трьох методів: C-образні затискачі, E-образні затискачі або гвинти. Кожен метод має свої переваги та недоліки, тому важко визначити, який з них є найкращим.

Загалом, гвинти легше знімати і вони зручніші для обслуговування, ніж С-образні або Е-образні затискачі. Однак гвинти мають більший ризик бути надмірно затягнутими, що може заблокувати вал і ускладнити обертання двигуна.
З іншого боку, були повідомлення про те, що С-образні затискачі вискакували під час польоту, що могло призвести до відриву дзвіночка двигуна і аварії. Хоча гвинти можуть здаватися безпечнішим варіантом, вони не застраховані від цієї проблеми.
Алюмінієвий сплав
Метал, з якого виготовлений розтруб і основа двигуна, визначає довговічність двигуна. Існує два поширених типи алюмінієвих сплавів, що використовуються в двигунах FPV: 7075 і 6082. Цифри позначають різні серії марок і хімічний склад алюмінієвих сплавів.
Якщо коротко, то 6082 має більшу пластичність і краще піддається формуванню, тоді як 7075 є більш жорстким і краще витримує зіткнення. 6082 використовувався ще до 2016/2017 року, але 7075 є найпоширенішим у сучасних двигунах і вважається міцнішим проти ударів.
Корпус мотору
Існує два типи конструкцій корпусів: двокомпонентна конструкція та конструкція Unibell.
Конструкція корпуса з 2 частин включає в себе оброблену верхню алюмінієву частину, з'єднану зі сталевим кільцем, прикріпленим під нею, - традиційна і широко використовувана конструкція в двигунах.
Конструкція Unibell має алюмінієвий корпус, що надягається на сталеве кільце - як тонка захисна оболонка, що оточує сталеве кільце.
Цілісна конструкція дзвона Unibell додає двигуну незначного збільшення ваги порівняно з двокомпонентною конструкцією дзвона, однак вона підвищує довговічність і знижує ризик зісковзування дзвона двигуна вниз, що є поширеною проблемою в деяких двокомпонентних конструкціях дзвонів. Двигуни з двокомпонентною конструкцією можуть постраждати від відокремлення контактного кільця від верхньої частини дзвону під час сильної аварії, що зробить двигун непридатним для використання. Однак з конструкцією Unibell таке практично не трапляється завдяки великій площі адгезії, яка забезпечує міцне і надійне з'єднання двох компонентів.
Незважаючи на невелику втрату у вазі, додаткова довговічність, яку забезпечує конструкція Unibell, на мою думку, виправдовує вартість. Зрештою. Незначне збільшення ваги призводить до значного збільшення міцності, а це компроміс, на який варто піти.
Конструкція флюсового кільця
Флюсове кільце - це кругле сталеве кільце всередині дзвону, яке містить магніти. корпус зазвичай виготовляється з алюмінію, тоді як флюсові кільця виготовляються зі сталі, оскільки вони повинні реагувати на лінії магнітного поля.
Останній дизайн кільця потокознімача має нестандартну форму замість звичної круглої, що допомагає спрямувати більше магнітних силових ліній назад у двигун і підвищити крутний момент.
Ущільнювальне кільце
Ущільнювальне кільце під внутрішньою частиною розтруба двигуна - чудова функція, яку варто мати в двигуні.
Ущільнювальне кільце діє як буфер/подушка, поглинаючи частину ударів від фізичних впливів. Це може допомогти зберегти плавність ходу підшипника протягом більш тривалого періоду, що потенційно збільшує термін служби двигуна. Додатковий захист, який забезпечує ущільнювальне кільце, також може зменшити потребу в технічному обслуговуванні та частоту заміни деталей, пропонуючи як економічні, так і практичні переваги для користувачів.
Конструкція днища
У дизайні корпусу двигуна існує більш традиційний підхід "закрите дно" і більш сучасний стиль "голе дно". Обидва варіанти мають свої плюси і мінуси.


Конструкція "закритого дна" означає міцнішу основу, однак "голе дно", як правило, легше за рахунок видалення надлишкового матеріалу, економія ваги становить близько 2 г.
У двигунів із закритим дном менша ймовірність потрапляння бруду всередину дзвону, всупереч твердженню, що у двигунів з голим дном бруд легше вичищається.
З відкритим дном ви можете чітко бачити, наскільки глибоко вкручені гвинти, і у вас менше шансів закоротити обмотку двигуна, якщо гвинти занадто довгі. (Це часто трапляється з початківцями з моторами із закритим дном).

Однак, закрите дно забезпечує краще розвантаження дротів у разі розриву та розтягування.
Посріблені мідні дроти
І срібло, і мідь відомі своєю винятковою провідністю. Але срібло, будучи більшим атомом з більшою кількістю внутрішніх електронних оболонок, дуже слабко утримує свій зовнішній електрон. Це означає, що воно може легше роз'єднувати свої електрони, дозволяючи їм вільніше рухатися по металу, переносячи тепло та електрику. Таким чином, срібло є навіть кращим провідником, ніж мідь.
Наносячи срібло на зовнішню сторону мідного дроту, ви покращуєте його електро- і теплопровідність, що є корисним для двигунів.
Однак мідні дроти зі срібним покриттям набагато дорожчі за звичайні мідні дроти, тому вони не дуже поширені в бюджетних двигунах.
Технологія PoPo
Система "Pop on Pop off" - це вал двигуна з підпружиненим підшипником для швидкого встановлення та зняття стійок.

Інші особливості
- Паяльні вкладки
- Інтеграція ESC
- Дизайн охолодження
Виробники двигунів постійно експериментують з різними конструкціями та рівнями апаратної інтеграції, що призвело до прогресу в охолодженні і навіть інтеграції ESC всередину двигуна. Особисто я вважаю, що паяні вкладки на двигуні можуть стати в нагоді, вони дозволяють використовувати більш тонкий дріт, щоб заощадити вагу в менш вимогливих до потужності додатках. Крім того, їх можна буде легко відремонтувати, якщо дроти обірвуться, що часто може означати кінець двигуна типової конструкції.
Двигуни для дронів правого та лівого обертання
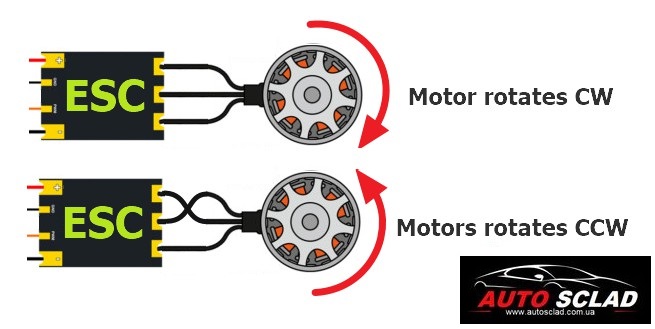
Ви рідко побачите безщіткові двигуни, марковані як CW (за годинниковою стрілкою) і CCW (проти годинникової стрілки).
Це не вказує на напрямок обертання двигуна. Безщіткові двигуни можуть обертатися в будь-якому напрямку. Ця позначка вказує на напрямок різьблення болта двигуна. Це зроблено для того, щоб під час обертання двигуна крутний момент від пропелера штовхав гайку двигуна до затягування, а не до ослаблення. Це запобігає розхитуванню і відпаданню ваших стійок під час польоту. Це означає, що вам знадобиться по дві гайки для 4-х двигунів при стандартній схемі обертання Betaflight.
- Спереду зліва: CW
- Передній правий: ПРОТИ ГОДИННИКОВОЇ СТРІЛКИ
- Задній лівий: CCW
- Задній правий: CW
Щоб визначити, чи правильно ви ввімкнули різьбовий двигун, просто потримайте гайку на валу, а потім почніть обертати двигун рукою в тому напрямку, в якому він повинен обертатися. Якщо гайка затягується, то у вас правильний двигун :)
Особисто я вважаю за краще мати однакову різьбу на всіх моїх двигунах, щоб не плутатися в різних гайках. Якщо вам потрібно замінити гайку в будівельному магазині, це може бути справжнім головним болем - знайти гайку з різьбою проти годинникової стрілки (або, що більш поширено в будівельному жаргоні, "гайку з лівою різьбою"). В наш час використовуються контргайки (з гумовим покриттям всередині), вони відносно добре тримаються, коли їх затягують, і їх нелегко відкрутити.